
国際特許分類[A01B35/00]の内容
生活必需品 (1,310,238) | 農業;林業;畜産;狩猟;捕獲;漁業 (84,932) | 農業または林業における土作業:農業機械または器具の部品,細部または附属具一般 (4,134) | 土作業のための他の機械 (457)
国際特許分類[A01B35/00]の下位に属する分類
非回転具を有するもの (183)
駆動されない回転または回転する器具を有するもの (8)
回転および非回転の器具を有するもの (5)
器具;細部 (3)
特殊な付加装置を有するもの (1)
国際特許分類[A01B35/00]に分類される特許
101 - 110 / 257
畦成形機
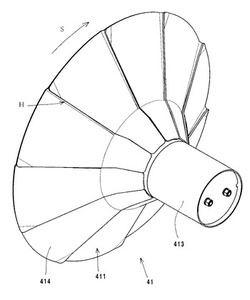
【課題】水田等の圃場の畦成形作業において、圃場の土壌条件に左右されずに強固な崩れにくい畦を成形できる畦成形機を提供する。
【解決手段】盛土部と、盛土部の移動方向の後方に設置される成畦部41とを有し、成畦部41は、上面ローラ413と、上面ローラ413の回転駆動力供給側に取り付けられ上面ローラ413の回転中心に向けた傾斜面を有する円錐状であり、表面は放射状の分割片414に分割され、それぞれの分割片414は回転方向に対して前進角を設けて側面視ジグザグ状に連結される円錐回転体411とからなる畦成形機において、円錐回転体411の分割片414の回転方向後端と隣接する分割片414の前端で形成される段差部Hは、円錐状面の頂部側である上面ローラ413側から円錐状面外端に向け段差寸法が徐々に増加するように形成する。
(もっと読む)
造粒システムおよび造粒方法

【課題】脱水機の設置を必要とせず、乾燥過程においては太陽光を用い、設備・運用コストが安価で、高い歩留まり率を実現し、環境への配慮をする。
【解決手段】工業用水等の浄水工程で発生する汚泥を天日乾燥ハウスを用いて粒土を製造する造粒システムであって、原料汚泥1を天日乾燥ハウス3内に敷き広げる手段と、該ハウス内に設置されて敷き広げられた汚泥を天日乾燥および撹拌しながら造粒する撹拌造粒手段4とを備え、撹拌造粒手段4は、ハウス内に敷き広げられた汚泥を、回転する耕うん爪である。
(もっと読む)
畦塗り機
【課題】トラクタにオフセット作業が行えるように装着された畦塗り作業機の自由度を制御して、精度の高い連続作業を可能にする。
【解決手段】走行機体2の後方に装着され、側方にオフセットした位置で作業部51が前進畦塗り作業を行う畦塗り機50において、作業部51の位置及び方位を検出する位置方位センサ20と、走行機体2と作業部51との相対位置を制御する第一の自由度を構成する手段と、作業部51の姿勢を制御するための第二の自由度を構成する構成手段と、前記第一の自由度および第二の自由度における水平回動量または水平移動量を制御する手段を備え、圃場隅部における走行機体2の姿勢変化に対応して、位置方位センサ20からの情報に基づき前記第一の自由度および第二の自由度における水平回動量または水平移動量を制御し、作業部51が畦に沿って直進姿勢を保持し、圃場の隅部付近までの直進作業状態を維持させる。
(もっと読む)
畦成形機
【課題】水田等の圃場の作業残隅部の畦成形作業を走行機を後進させて行うような熟練を要する作業機ではなく、制御装置や制御プログラムが簡易で操作が簡単であるとともに、全体の製造コストを低くできる畦成形機の提供。
【解決手段】走行機が畦から離れる方向に旋回走行しながら直線状の連続した畦を成形する非平行走行畦成形作業が行える制御部を有し、非平行走行畦成形作業時は、畦成形作業部4に畦成形作業部4の進行方向の変位量を検知する検知手段6が設けられていて、変位量に基づき第2水平回動手段を作動させて畦成形作業部4の進行方向を一定方向とする制御を行うとともに、第1水平回動手段はフリー状態と固定状態を交互に予め設定した実行時間で繰り返し行う制御のみにより制御されて畦成形作業を行う畦成形機による。
(もっと読む)
農作業機
【課題】トラクタからの外部電源が不要でトラクタから下りて手作業で配線接続をする必要がない農作業機を提供する。
【解決手段】農作業機1は、トラクタ2のPTO軸6側からの動力で作動する油圧ポンプ31と、この油圧ポンプ31からの作動油で作動する油圧モータ32と、作動油を制御する制御手段51とを備える。農作業機1は、トラクタ2のPTO軸6側からの動力で作動する発電手段41と、この発電手段41による電力で作動して制御手段51をコントロールするコントローラ52とを備える。
(もっと読む)
畦塗り機
【課題】土質に対応可能で、適切な畦塗り作業ができる畦塗り機を提供する。
【解決手段】畦塗り機1は、土を盛り上げる回転可能な盛土体3と、盛土体3による盛土を締め固めて畦を形成する回転可能な畦形成体4とを備える。また、この畦塗り機1は、盛土体3が正方向に回転する正転状態と盛土体3が逆方向に正転状態時に比べて速い回転速度で回転する逆転状態とに選択的に切り換え可能となっている。
(もっと読む)
畦塗り機
【課題】所望硬さの畦上面を形成できる畦塗り機を提供する。
【解決手段】畦塗り機は、土を盛り上げる盛土体と、盛土を締め固めて畦側面を形成する畦側面形成体24と、盛土を締め固めて畦上面を形成する畦上面形成体25とを備える。畦上面形成体25は、この畦上面形成体25の回転方向aに並んで位置する複数の畦上面形成面部44を外周側に有する。各畦上面形成面部44は、畦側面形成体24側に向うに従って回転方向aとは逆方向に向う螺旋形状に形成する。また、各畦上面形成面部44は、土との接触時には畦上面形成体25の回転中心軸線X側へ移動する。
(もっと読む)
農作業機
【課題】トラクタからの回転動力を伝達する伝動部の途中に有する動力伝達部で回転差が生じているか否かを検出するトラクタに装着する農作業機を提供することを目的とする。
【解決手段】トラクタからの回転動力を入力し入力した回転動力を伝動部で伝動させて作業部で出力して農作業を行うトラクタに装着する農作業機において、伝動部に一定条件下での動力を伝達する動力伝達部10を介在し、動力伝達部10より入力側の伝動部の回転を検知する第1の検知部4と、動力伝達部10より出力側の伝動部の回転を検知する第2の検知部5と、2つの検知部4、5からの情報を取得し動力伝達部10で回転差が生じているか否かを検出する制御部2とを有することで上記課題を解決する。
(もっと読む)
畦塗り機の整畦体用羽根板及びそれを使用した整畦体
【課題】畦の法面を整形する法面整畦部と、複数枚の羽根板を有し、畦の上面を整形する上面整畦部とを備える整畦体を装着した畦塗り機において、上面整畦部の羽根板によって畦上面から法面へかけての表面を連続的に、特に曲面に仕上げることを可能にする。
【解決手段】法面整畦部2と、本体となる支持部材31とその周面に接続される複数枚の羽根板32を有し、法面整畦部2の軸方向先端部に連結されて法面整畦部2と共に回転する上面整畦部3とを備え、畦塗り機10に装着される整畦体1において、
支持部材31に接続される接続部32aと、接続部32aに連続し、上面整畦部3の回転方向下流側に張り出す張出部32bとを有し、少なくとも張出部32bの法面整畦部2側の端部に、上面整畦部3の回転方向上流側から下流側へかけて上面整畦部3側から法面整畦部2側へ接近する形状をし、法面整畦部2に重なる移行部32dを形成する。
(もっと読む)
農作業機
【課題】相対的に互いに回動する2つの構成部を有する場合に、この回動をロックするロック機構がコンパクトとなるトラクタに装着する農作業機を提供することを目的とする。
【解決手段】一方の構成部50は、当て部材51を有し、他方の構成部20は、第1の受け部材61と、第2の受け部材62と、第1の受け部材61と第2の受け部材62の間に配設されたロック体42とを有し、ロック体42は、一方の構成部50の相対的な回動による当て部材51に対して通過可能位置と干渉位置とに変更可能であり、2つの構成部50、20の回動のロックは、当て部材51が、第1の受け部材61と干渉位置におけるロック体42の第1の受け部材61側端部42aとの間に挟まれる第1のロック状態と、第2の受け部材62と干渉位置におけるロック体42の第2の受け部材62側端部42bとの間に挟まれる第2のロック状態とでなされる。
(もっと読む)
101 - 110 / 257
[ Back to top ]