
国際特許分類[A01D34/24]の内容
生活必需品 (1,310,238) | 農業;林業;畜産;狩猟;捕獲;漁業 (84,932) | 収穫;草刈り (6,752) | 刈取機;収穫機の刈取装置 (2,268) | 切断装置の種類に関連した特質によって特徴づけられるもの (2,181) | 往復動するカッターを有するもの (352) | カッターバーの揚上装置 (134)
国際特許分類[A01D34/24]の下位に属する分類
手動式のもの (9)
カッターバーの揚上中にナイフの駆動機構の動力伝達を断つ装置 (2)
国際特許分類[A01D34/24]に分類される特許
1 - 10 / 123
コンバイン
【課題】刈取部が接地した場合であっても刈取部が地中に突き刺さってしまう前に刈取部を上昇させることができるコンバインを提供する。
【解決手段】コンバインは、刈取部4を昇降させる油圧シリンダ9と、刈取部4の接地を検出する接地式刈高さセンサ90と、接地式刈高さセンサ90の検出結果に基づいて、油圧シリンダ9を駆動させて刈取部4の上昇制御を行う制御装置70と、を備え、刈取部4が接地した際の走行速度vが第二設定速度V2以上の場合、制御装置70は、刈取部4の上昇速度を速くする制御を行う。
(もっと読む)
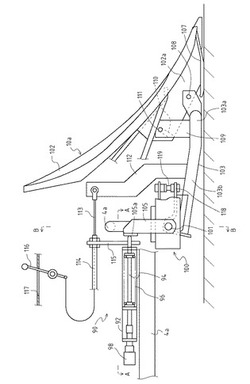
コンバインの刈高さ検出装置及びこの刈高さ検出装置を備えた刈高さ制御装置

【課題】比較的狭いスペースに刈高さ検出装置を設けて、刈取部の前後左右の動きに追従して接地体に前後左右方向から作用する外力で刈高さ検出装置が破損しないようにしたコンバインの刈高さ検出装置及び刈高さ制御装置を提供する。
【解決手段】刈取装置(27)に備えた分草体(42)の下部に上下方向の第一支持軸(1)を設け、この第一支持軸(1)に対して第一支持体(2)を上下スライド自在及び回動自在に取り付け、この第一支持体(2)の後側部に設けた前後方向の第二支持軸(3)に対して第二支持体(4)を回動自在に取り付け、この第二支持体(4)に設けた左右方向の第三支持軸(5)に対して斜め後下方へ延出する接地体(6)の基部を取り付け、この接地体(6)の上下揺動による第三支持軸(5)の回動角度を検出する角度センサ(10)を設けたコンバインの刈高さ検出装置
(もっと読む)
コンバインの刈高さ制御装置
【課題】刈取部のデバイダや刈刃装置が圃場面に接触して破損する可能性を大幅に低減させる。
【解決手段】主変速レバー24の操作に応じて車速が増減される走行機体1aと、該走行機体1aの前部に昇降自在に連結される刈取部2と、該刈取部2の刈高さを制御する制御部34とを備えるコンバイン1において、主変速レバー24による車速の急減速操作を判断するとともに、該急減速操作を判断したとき、車速の急減速に伴う走行機体1aの前傾状のピッチングを想定し、刈取部2を所定の高さまで自動的に上昇させるピッチング刈高さ制御手段34aを備える。
(もっと読む)
コンバイン
【課題】刈取部の上昇に連動して刈取クラッチを入り状態から切り状態に切り換える連動操作機構を少ない部品点数で組み立てやすく構成する。
【解決手段】刈取クラッチ6のテンションアーム46と、刈取クラッチレバー16とを操作ワイヤ50のインナーワイヤ50Aで連結し、この操作ワイヤ50のアウターワイヤ50Bの一端を中間部材55に連結した。刈取部Bに備えた規制部材59Cと中間部材55との間に作動部材60を備え、刈取部Bが設定レベルを超えて上昇した場合に作動部材60の先端に規制部材59Cを当接させ、作動部材60から中間部材55に押圧力を作用させ、この中間部材55の揺動により刈取クラッチ6の切り操作を行うように構成した。
(もっと読む)
コンバインの刈高さ制御装置
【課題】
比較的大きな凹凸部がある圃場での刈取作業でも、刈取部の分草杆の地面への突入を防止しながら刈取作業を行なえるものとする。
【解決手段】
刈取搬送部(7)を昇降させる昇降手段(15)と、刈取搬送部(7)の対地高さを検出する刈取接地センサ(SE2)と、刈取搬送部(7)の対機体高さを検出する刈高さセンサ(SE3)とを備えたコンバインにおいて、刈高さセンサ(SE3)の検出値と目標刈高さ設定値に基づいて昇降手段(15)を作動させる刈高さ昇降制御を実行し、刈高さ昇降制御の実行中に刈取接地センサ(SE2)によって検出される刈取搬送部(7)の対地高さが、刈取接地センサ(SE2)の接地部が地面より上方に離れた場合に検出される離間基準値以上の値になった場合に、刈取搬送装置(7)を下降させる側の出力を停止するコントローラ(21)を設ける。
(もっと読む)
コンバインの前処理昇降制御装置
【課題】刈高さ解除制御で下降させ過ぎた前処理部を少しだけ上昇させるためにマルチステアリングレバーを上昇操作すると、刈高さ解除制御のためにトリガースイッチを操作していることで前処理部が自動上昇駆動してしまい、オペレータの想定を超えて前処理部が上昇するという課題があった。
【解決手段】刈高さ解除制御手段(21C)の作動中は、前処理操作検出手段(22)による昇降操作レバー(11)上昇操作を入力しても、自動昇降制御手段(21A)による前処理部(5)の自動上昇駆動を行わないように牽制した。
(もっと読む)
コンバインの刈取装置
【課題】 湿田であっても刈取装置の対地高さを正確に検出でき、構造の簡素なコンバインの刈取装置を具現する。
【解決手段】 機台(2)の前側に昇降自在に支持した下部ギアケース(17)から、前方に向けて分草フレーム(18)を延出し、分草フレーム(18)の前端部に後上がり傾斜姿勢の分草板(29)を取り付け、分草フレーム(18)の前部には、刈取装置(6)に対して上下に揺動しながら接地追従する接地輪(28c)と、接地輪(28c)の上下揺動位置を検出するセンサ(28)を設け、接地輪(28c)の少なくとも一部が分草板(29)の上側に突出する構成とする。また、接地輪(28c)を樹脂材により成形し、接地輪(28c)の内部を空洞とする。
(もっと読む)
コンバインの刈高さ検出装置
【課題】 湿田であっても刈取装置の対地高さを正確に検出でき、構造の簡素なコンバインの刈高さ検出装置を具現する。
【解決手段】 昇降自在に設けられた刈取装置(6)の前部に、刈取装置(6)に対して上下に揺動しながら接地追従する接地輪(28c)と、接地輪(28c)の上下揺動位置を検出するセンサ(28)を設ける。また、接地輪(28c)を分草フレーム(18L)の前端部に支持された分草体の下側に配置し、接地輪(28c)の上部が分草体から上方へ突出する構成とする。また、分草体(26)を分草フレーム(18L)の前端部から引起装置(21)の下部へ向けて後上がりに傾斜した左右の分草ガイド(26,26)で構成し、左右の分草ガイド(26,26)の間隔部に接地輪(28c)が侵入する構成とする。
(もっと読む)
コンバイン
【課題】車高が低下調節がされた場合にも刈取装置の高さ位置を確保できるコンバインを提供する。
【解決手段】コンバインは、車高調節部11を介して機体フレーム1aを高さ調節可能に支持する走行装置3と、機体フレーム1aの前部の刈取昇降部14を介して昇降調節可能に穀稈を刈取る刈取装置4とを備えて構成され、車高調節部11による調節高さを検出する車高検出部11sと、刈取昇降部14による昇降高さを検出する刈取昇降検出部14sと、前記車高調節部11及び刈取昇降部14の動作を制御する制御部Cとを設け、該制御部Cは、前記車高調節部11への下降出力の開始と前記車高検出部11sによる下降側への高さ変化とのうちの何れかが検出され、且つ、刈取昇降検出部14sによる高さが設定値未満となった場合に、前記刈取昇降検出部14sの検出値が設定値以上となるまで前記刈取昇降部14に上昇出力を行なう構成としたものである。
(もっと読む)
コンバインの刈高さ検出装置
【課題】刈取部の前後左右の動きによって接地体に前後左右方向から外力が作用しても、刈高さ検出装置が破損しないようにする。
【解決手段】刈取装置(27)に上下方向の支持軸(1)を設け、該支持軸(1)に対して第一支持体(2)を上下スライド自在且つ左右回動自在に支持し、該第一支持体(2)の後部に前後方向の前後軸(3)を設け、該前後軸(3)に対して第二支持体(4)の上部を上下回動自在に支持し、該第二支持体(4)の下部に左右方向のセンサ軸(5)を設け、該センサ軸(5)から後下方へ延出する接地体(6)を設け、該接地体(6)の上下回動角度を検出する角度センサ(10)を設ける。
(もっと読む)
1 - 10 / 123
[ Back to top ]