
国際特許分類[A61B5/06]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 診断;手術;個人識別 (80,876) | 診断のための検出,測定または記録;個体の識別 (27,366) | 放射線を用いずに異物を検出または探知するための用具 (130)
国際特許分類[A61B5/06]に分類される特許
31 - 40 / 130
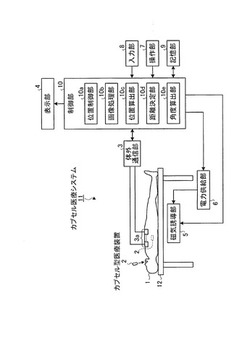
カプセル医療システム
【課題】被検体内部の所望の生体組織に対して処置を行うカプセル型医療装置の処置部と処置対象の生体組織とを高精度に位置合わせすることができること。
【解決手段】本発明にかかるカプセル医療システム11は、被検体1内部に導入されるカプセル型医療装置2と、カプセル型医療装置2が無線送信した情報を受信する体外通信部3と、カプセル型医療装置2が撮像した体内画像等を表示する表示部4と、各種情報を入力する入力部8と、制御部10とを備える。カプセル型医療装置2は、被検体1内部の生体組織に対する処置を行う処置手段を備え、磁気誘導部5の外部磁界によって誘導される。制御部10は、表示部4に表示された体内画像の中から入力部8によって選択された処置対象と前記処置手段との相対距離を決定し、前記外部磁界を制御して前記相対距離だけカプセル型医療装置2を移動させる。
(もっと読む)
位置検出システム

【課題】3次元空間内に検知体を導入した後であっても、検知体を除去せずに3次元空間内の実際的な環境磁界データを検出でき、これによって検知体の位置検出精度を向上できること。
【解決手段】本発明にかかる位置検出システム1は、3次元空間S内に駆動磁界を発生させる駆動磁界発生部10と、この駆動磁界に共振して共振磁界を発生するカプセル型医療装置2と、3次元空間S内部の磁界を検出する磁界検出部13と、磁界検出部13の磁界検出データをもとにカプセル型医療装置2の位置方向情報を算出する位置方向算出部15と、制御部19とを備える。カプセル型医療装置2は、撮像タイミングに合わせて共振状態を定期的に解除する。制御部19は、共振状態の期間に位置方向算出部15に位置方向算出処理を実行させ、非共振状態の期間に位置方向算出処理のキャリブレーション値を取得、更新する。
(もっと読む)
カプセル型医療装置
【課題】患者にかかる負担を軽減することができるカプセル型医療装置を提供する。
【解決手段】カプセル型の筐体2と、該筐体2内に配置され、該筐体2外に配置された被検査部位の測定情報を取得する測定情報取得部4,6と、該測定情報取得部4,6により測定情報が取得された被検査部位の位置を特定するための情報を取得する位置特定情報取得部5と、該位置特定情報取得部5により取得された被検査部位の位置を特定するための情報と測定情報取得部4,6により取得された測定情報とを対応づけて記憶する記憶部7とを備えるカプセル型医療装置1を提供する。
(もっと読む)
医療用機器の診断及び取扱いならびに映像システム
【課題】参照フレームと比較して体内侵入的医療機器の位置と方位を決定するための位置決めシステムを提供する。
【解決手段】ドライブ信号に応じて、既知の識別可能な場、好ましくは連続する交流磁場、を発生させる複数の場発生器(18,20,22)と、該場に応じてセンサ信号を発生する観血的の医療機器(10)中の遠心端近傍に位置した複数のセンサ(30,32,34)と、該ドライブ信号と該センサ信号に対応した複数の信号に対する入力を持ち、かつ該ドライブ信号と該センサ信号に応じて、医療機器中のある部分の三個の位置座標と三個の方位座標を計算する信号プロセッサ(26)より成るシステムである。
(もっと読む)
位置および配向の磁気測定
【課題】空間における対象の位置および配向を測定する改良された装置および方法、特に、生存している対象の身体内におけるプローブの位置および配向を測定する改良された装置および方法を提供する。
【解決手段】磁気による位置および配向測定系は、検出空間の対向する側部に配置されたヘルムホルツコイル34、36、38からの均一な場と、同じコイルが発生するグラジェント場からなるのが望ましい磁場を使用する。これらの磁場の印加の際にプローブ50において検出される場成分を監視することにより、場におけるプローブ50の位置および配向を推測することができる。プローブ50の表示108を被検体の別に取得された画像に重畳して、被検体に対してプローブ50の位置および配向を示すことができる。
(もっと読む)
無線給電システム
【課題】被検者112の肉体的な負担を低減した無線給電システム1を提供する。
【解決手段】電力を受電する受電コイル26の軸がカプセル型筐体21の長手方向であり、かつカプセル型筐体21の重心が長手方向に偏心しており、かつ被検者112の体腔内に導入される液体113より比重が小さいカプセル型内視鏡111と、被検者112に装着され外部からカプセル型内視鏡111に電力を供給できる第1の送電コイル114と、被検者112を検査する検査台116に搭載され外部からカプセル型内視鏡111に電力を供給できる第2の送電コイル115とを備える。
(もっと読む)
カテーテルの血管内留置のための統合システム
患者の血管内にカテーテルを正確に留置するための統合型カテーテル留置システムが開示される。一実施形態において、統合システムは、システムコンソール、患者の胸部に一時的に配置される先端位置センサ、および超音波プローブを含む。先端位置センサは、カテーテルが血管内に配置されているときに、カテーテルの内腔内に配置されるスタイレットの磁場を検知する。超音波プローブは、カテーテルの血管内導入に先立って、血管系の一部を超音波撮像する。超音波プローブは、超音波モードでは超音波プローブの使用を、先端位置特定モードでは先端位置センサの使用を制御するための、ユーザ入力制御部を含む。別の実施形態では、患者の心臓の結節に対する所望の位置へのカテーテル先端の誘導を可能にするために、ECG信号によるカテーテル先端誘導機能が、統合システムに含まれている。 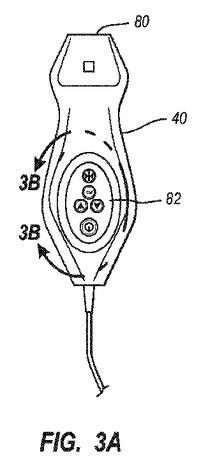 (もっと読む)
(もっと読む)
光ファイバ形状追跡を採用したシステム、装置、および方法
本発明は、光ファイバ形状および位置追跡を採用したシステム、装置、および方法を提供する。該システム、装置、および方法は、形状が時間とともに動的に変化する物体の形状および位置の測定および連続的な追跡を可能にするものである。用途としては、診断用および外科手術用内視鏡の追跡および監視が挙げられる。 (もっと読む)
カプセル内視鏡の位置検出装置、位置検出方法、並びにカプセル内視鏡システム
【課題】部品を追加することなく、検出精度よく被検体内におけるカプセル内視鏡の位置を検出する。
【解決手段】カプセル内視鏡システム2の受信装置12は、マイクロ波CT部88とデータ解析回路89とを備える。マイクロ波CT部88は、アレイアンテナ22の動作を制御してチャープパルスのマイクロ波を患者10に走査させるとともに、アレイアンテナ22からの出力を元に、患者10の体内の比誘電率分布を表す三次元画像を生成する。データ解析回路89は、三次元画像データを解析し、CE11と生体組織との比誘電率の差を利用して、三次元画像データ内のCE11に該当する領域を認識し、その位置を求める。データ解析回路89は、1フレーム前と現フレームの三次元画像データ間のCE11の移動距離を算出する。
(もっと読む)
涙管インプラントの検出
本明細書では、涙点内に少なくとも部分的に挿入可能な涙管インプラントを備える装置について説明する。涙管インプラントは、インプラント・コアとインプラント本体とを備える。インプラント本体は、インプラント・コアを収容できるサイズおよび形状を有するキャビティを備える。インプラント・コアおよびインプラント・キャビティのうちの少なくとも一方は別の検出器デバイスで涙管インプラントの自動検出を可能にするように構成された検出デバイスを備える。 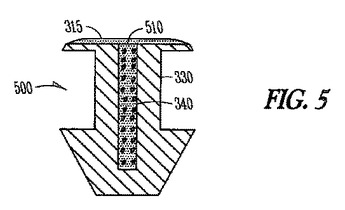 (もっと読む)
(もっと読む)
31 - 40 / 130
[ Back to top ]