
国際特許分類[A61B8/08]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 診断;手術;個人識別 (80,876) | 超音波,音波または亜音波を用いることによる診断 (6,683) | 組織の動きまたは変化の検出,例.腫瘍,嚢腫,腫脹 (1,068)
国際特許分類[A61B8/08]に分類される特許
1,061 - 1,068 / 1,068
血管の画像診断を使用する心臓血管疾患の初期の検出用の装置及び方法
本発明は,動脈(27)に超音波信号を指向させる超音波信号源(32);動脈(27)から反射した,または,動脈(27)を通過した超音波信号(36)を受け取る超音波信号レシーバー(34);動脈ディスプレースメントデータ(42)を抽出するために超音波信号レシーバー(34)によって受け取られた信号(40)を分析するための手段;血圧データ(48)を得るための手段;前記血圧データ(48)を使用して,前記動脈ディスプレースメントデータ(46)を調整するための信号処理手段(44);及び,前記調整された動脈ディスプレースメントデータ(51)を分析して動脈の機能(28)を特徴づける手段を含む心血管疾病の初期の検出用に血管の性質を決定するための装置(10)及び方法(24)を提供する。 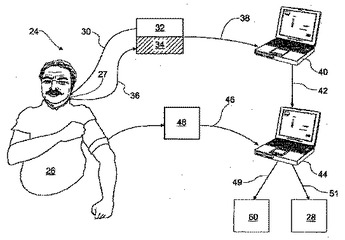 (もっと読む)
(もっと読む)
超音波の臨界角反射測定法を使用する、迅速で正確な骨質の検出
本発明は、伝送器(12)及び2以上の受信器(16a、16b)を含む超音波変換器(10)を使用して標的からの超音波の2以上の臨界角反射値を同時に検出、決定し、そして標的(24)の弾性係数を計算することにより、標的(24)の弾力性の係数を決定するための装置、方法及びシステムである。 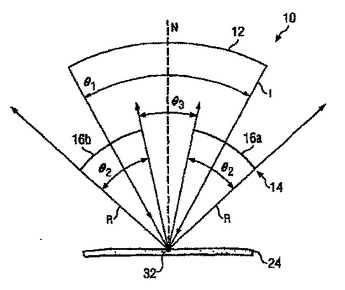 (もっと読む)
(もっと読む)
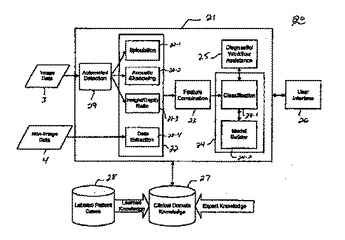
乳房撮像の自動診断及び決定支援システム及び方法
乳房撮像CAD(コンピュータ診断)システム及びアプリケーションは、患者から収集した情報(画像データ及び/又は非画像データを含む)から特徴を自動的に抽出し分析することにより、例えば、乳癌の自動診断及び、例えば、乳癌のスクリーニング及び段階付け等の決定支援を可能にする他の自動決定機能を含む医師のワークフローの種々の局面について決定支援を行う。CADシステムは、1またはそれ以上の関連の臨床ドメインにおける標識化された患者症例のデータベースから取得(学習)される訓練データセット及びかかるデータの専門家による解釈を用いることにより、CADシステムが患者データの分析について「学習」し、医師のワークフローを支援する適切な診断評価及び決定を行えるようにする機械学習法を実施する。
 (もっと読む)
(もっと読む)
カラーフローバイプレーンの超音波撮像システム及び方法
異なるエレベーション平面にあるボリューム領域の2つの平面がリアルタイムで走査される超音波診断撮像システムが開示されている。ある実施例において、これら2つの平面は、トランスデューサが単一の平面に送信することができる走査ラインの最大数よりも少ない数で走査される。ユーザ制御部は、トランスデューサを動かすことなくこれら2つの平面がラテラル方向に動かされることを可能にする。他の実施例において、各画像平面は、画像における同じ夫々の位置に流動又は動きを示すカラーボックスを含んでいる。これら2つの画像のカラーボックスは、両方のボックスがこれら2つの画像の同じ対応するエリアにあるように連係してサイズ決め及び位置決めされることができる。 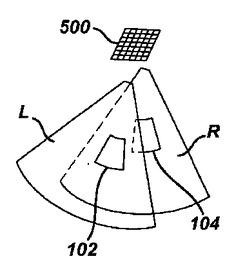 (もっと読む)
(もっと読む)
体の臓器の動作を記録する機器及び方法
本発明は、例えば、心臓(9)といった体の臓器の特に呼吸によって引き起こされた動作を記録する機器及び方法に係る。横隔膜(10)の一部(3)は、X線装置又は超音波装置によって記録され、横隔膜の現在位置は、結果として得られる画像において検出される。他の内臓の関連付けられる位置についての情報は、モデルに支援されて横隔膜の位置から得ることが可能である。この情報は、カテーテル用のナビゲーションシステムにおいて使用可能であり、それにより、脈管系に対するカテーテルの空間座標を設定する。 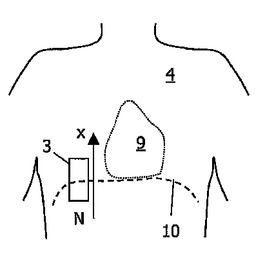 (もっと読む)
(もっと読む)
超音波骨評価装置
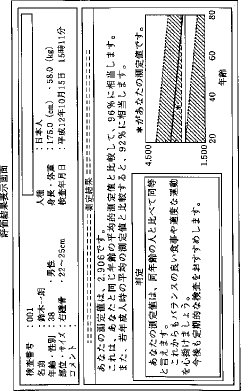
【課題】的確な骨評価をすることができ、かつ、その評価結果を分かりやすく表示することができる超音波骨評価装置を提供すること。
【解決手段】本発明の超音波骨評価装置は、例えば被験者の踵の部分に対して超音波の送受信を行い、踵骨を伝搬する超音波の音速および減衰度合いを測定し、その測定値に基づいて骨評価を行うものであり、表示部に表示される評価結果表示画面には、被験者の測定値と比較する比較情報がグラフ化して表されている。この比較情報は、入力された被験者の人種、性別、年齢等のファクター情報に基づいて、複数組の中から当該被験者に適したものが選択される。そして、選択された比較情報と、被験者の測定値との比較結果に基づいて、判定(評価)メッセージが表示される。
(もっと読む)
超音波診断装置

【目的】本発明は、超音波診断装置に関し、拍動や吸吸の影響で動いている被検体内部の深さ方向の変位を高精度に計測する機能を備える。
【構成】走査方向(深さ方向(z方向)とほぼ直角なx,y方向)の位相パターンを求め、この位相パターンの走査方向(x、y方向)の変位Δx(Δx、Δy)を求めて、従来と同様に例えばパルスドップラ法等を用いて求めた深さ方向(z方向)の見掛け上の位相Δθzを、上記変位Δx(Δx、Δy)と上記位相パターンに基づいて補正する。または、受信信号に基づいて走査方向(x,y方向)の変位Δx(Δx、Δy)を求め、また走査方向(x,y方向)の位相パターンを求め、これらの変位Δx(Δx、Δy)および位相パターンに基づいて深さ方向(z方向)の見掛け上の位相Δθzを補正する。または、走査方向(x,y方向)の位相パターンを求め、この位相パターンに基づいて走査方向(x,y方向)の変位Δx(Δx、Δy)と深さ方向(z方向)の変位Δzを求める。
(もっと読む)
超音波吸引装置
1,061 - 1,068 / 1,068
[ Back to top ]