
国際特許分類[A61B9/00]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 診断;手術;個人識別 (80,876) | 打診による診察機器;打診槌 (5)
国際特許分類[A61B9/00]に分類される特許
1 - 5 / 5
性格判別装置、性格判別方法、コミュニケーションロボットおよび電子機器
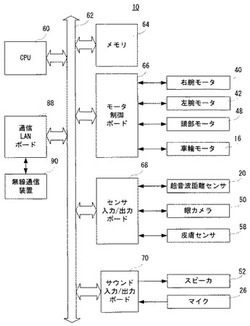
【構成】 コミュニケーションロボット10はCPU60を含み、CPU60は皮膚センサ58によって検出された検出信号に基づいて、人間が触っている場所(部位)、強度および継続時間を検出する。CPU60は、この検出結果に基づいて、人間の性格を、積極的、消極的、荒っぽい、自由奔放および不明のいずれかに判別する。つまり、ロボット10は、自身に接した人間の性格を判別する。たとえば、ロボット10は、人間の性格を判別すると、当該人間の性格に応じたコミュニケーション行動を実行する。
【効果】 簡単に人間の性別を判別して、適切なサービスを提供することができる。
(もっと読む)
診断ロボット、診断ロボットの制御方法及び制御プログラム

【課題】例えば、会話を十分に行うことができない子供の患部を探し当てることができる診断ロボット、診断ロボットの制御方法及び制御プログラムを得ることを目的とする。
【解決手段】押し当て部5により触診用部材であるロボットの指23aが押し当てられている状態にあるときのユーザの反応を観測する反応観測部6を設け、患部認定部7が触診ポイント設定部4により設定された触診ポイントP1〜PNの中で、反応観測部6により観測されたユーザの反応が最も大きい触診ポイントPmaxを特定して、その触診ポイントPmaxを患部に認定する。
(もっと読む)
筋伸張反射測定装置
【課題】 叩打ミス(ミスインパクト)及び/又は測定前の筋収縮を検出することで、筋伸張反射の叩打データの測定精度を向上させること。
【解決手段】 解析装置4は、叩打ハンマー1により骨を叩打した場合と腱を叩打した場合を、叩打力の時間軸波形とFFT波形から識別し、ミスインパクトを判定する。解析装置4は、ミスインパクトによる結果であれば、正しいインパクトの結果から除去する。また、解析装置4は、筋電計3により測定前の筋電位をモニタリングし、筋収縮がある場合は測定が出来ない、または、測定結果から除去されるようにする。
(もっと読む)
微小組織反復圧迫装置
【課題】 本発明は、動物の末梢神経又は血管などの束状で連続性のある微小組織に対して反復的に圧迫し、微小外力による障害の病態を解析することを目的とする。
【解決手段】 本発明は、固定器で固定され、微小組織に圧力を加える圧迫器と、圧迫器に対する空気圧の供給をリリーフ弁を使用して持続的に行うコンプレッサーと、コンプレッサーから供給された空気圧を検出する圧力センサと、圧力センサで検出した値を元に圧迫器に供給する圧力を調節する圧レギュレータと、圧迫器への空気圧の供給又は解除を切り替える電磁バルブと、電磁バルブの開閉を制御するプログラム式コントローラと、プログラム式コントローラに動作を自動化するためのプログラムを転送するとともに、圧力センサの値を圧トランスデューサにより信号を変換したデータを解析してモニタに表示するコンピュータとからなる構成とした。
(もっと読む)
伸張反射測定装置
【課題】 本発明は、測定者の技術や経験によることなく、神経障害部位の推定や障害程度の評価が可能である伸張反射測定装置を提供することを目的とするものである。
【解決手段】 本発明は、力センサーを内蔵した打腱器と、被測定者の関節に取り付けた加速度センサーと、前記打腱器の力センサーと前記加速度センサーのデータを解析処理する解析装置と、前記解析装置で処理されたデータを表示するコンピュータとからなり、被測定者の腱を前記打腱器で刺激した際に誘発される伸張反射を測定することにより、被測定者の神経系障害部位の推定や障害程度の評価ができるようにしたことを特徴とする伸張反射測定装置の構成とした。
(もっと読む)
1 - 5 / 5
[ Back to top ]