
国際特許分類[A61F2/62]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 血管へ埋め込み可能なフィルター;補綴;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント;整形外科用具,看護用具または避妊用具;温湿布;目または耳の治療または保護;包帯;被覆用品または吸収性パッド;救急箱 (33,358) | 血管への植え込み可能なフィルター;補綴,すなわち,身体の各部分のための人工的代用品または代替物;身体とそれらを結合するための器具;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント (9,831) | 身体内へ植込まない人工器官 (599) | 人工脚または足またはそれらの部品 (219) | 調節可能なもの,例.調節可能な脛,腿,または管状骨系 (41)
国際特許分類[A61F2/62]に分類される特許
1 - 10 / 41
筋力補助装置及びその動作方法
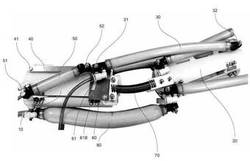
【課題】第1の装着具に対する第2の装着具の曲げ角度を大きくすることができる筋力補助装置を提供する。
【解決手段】筋力補助装置は、関節の一方の骨に沿って配置される第1の装着具10と、関節の他方の骨に沿って配置される第2の装着具20と、第1の装着具10に一端31を、第2の装着具20に他端32を設ける人工筋30とを備え、使用者の肘、膝、又は手首の動作を支援し、第1の装着具10に一端51を設ける補助人工筋50を備え、補助人工筋50の他端52を、スイングアーム40を介して人工筋30の一端31と接続し、補助人工筋50によって、人工筋30の一端31を第1の装着具10に対して変位可能な構成としたことを特徴とする。
(もっと読む)
歩行支援装置

【課題】安定的固定と装着感の両者を満足させることを目的とする。
【解決手段】固定具によって装置を脚に固定するが、固定具による締付力を変更する固定具アクチュエータを設けることにより、歩行支援装置の締付力を可変にする。そして、歩行支援装置1は、各姿勢センサや反力センサの検出値から、各関節アシストアクチュエータに対する歩行アシスト力を決定し出力することで歩行を支援する。一方、決定した各関節アクチュエータに対する歩行アシスト力が所定の閾値を超えるかどうかを判断し、超えている場合には大きなアシスト力を無駄なく脚に作用させるために、固定具アクチュエータを駆動して締付力を強くする。一方、歩行アシスト力が所定閾値以下の場合には、アシスト力の伝達(作用)よりも歩行支援対象者の装着感を優先して、締付力を弱くする。
(もっと読む)
歩行支援装置
【課題】安定的固定と装着感の両者を満足させることを目的とする。
【解決手段】締付力を変更する固定具アクチュエータを設けることにより、歩行支援装置の締付力を可変にする。そして、1歩行周期の間を動作の状態に応じて区分し、各歩行動作状態の区分毎に各装着部21〜23の締付強度を予め決めておく。そして、各センサ出力から、脚がどの区分の歩行動作状態にあるかを検出し、検出した区分対応する締付力で各装着部21〜23を締め付ける。
(もっと読む)
歩行支援装置
【課題】二重関節において歩行アシストに適するように変動過度特性を動的に調整する。
【解決手段】歯車54は、中央にザグリ部75を有する貫通孔76が形成されている。ザグリ部75の内周側には、伸縮する偏心アクチュエータ73a〜73dが十字状に設置されている。偏心アクチュエータ73b、73dは、固定軸55の両側に対向して配置されており、端部は、固定軸55の両側を挟持している。偏心アクチュエータ73a、73cは、偏心アクチュエータ73b、73dの軸線に対して垂直な方向において、固定軸55の両側に対向して配置されており、端部は、固定軸55の両側を挟持している。偏心アクチュエータ73a〜73dを駆動して歯車54の回転軸を中心点80から貫通孔76内の任意の点に偏心させる。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】歩き方が異なる場合であっても、一定の負担感での歩行支援を行う。
【解決手段】1歩行周期の間における装着者の負担量として角力積(関節モーメントの時間積分値)に着目し、歩行状態によらずに装着者の1歩行周期における角力積が一定となるように各関節のアシストを行う。すなわち、基準となる歩行状態の1歩行周期における角力積から、歩行支援装置がアシストした角力積を除いた角力積を基準角力積zとし、歩行パラメータの値が変化する(歩き方が変わる)ことで角力積が増加したとしても、装着者が負担すべき角力積が基準角力積zと均しくなるようにアシスト率βを設定する。これにより歩行パラメータの値が変わっても、一定の基準角力積zの負担感で歩くことが可能になる。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者が体感する負荷の変動を小さくした歩行支援をする。
【解決手段】歩行支援装置において、装着者Mの疲労度を推定し、推定した疲労度をアシスト量を決定するパラメータとして使用することで、疲労度を考慮した可変アシスト制御を行う。具体的には、脚部を繋ぐリンク(連結部)に、大腿部、脹脛部、足部の各部を拘束部材で拘束し、各拘束部材に歪ゲージを取り付け、歪ゲージの出力から各部の拘束力を測定する。この測定した拘束力が大きくなると、対応する各部がむくんでいると考えられ、装着者の疲労度が増加していると推定される。そこで、推定した疲労度の増加に対応して、アシスト量を通常の設定(アシスト量)よりも大きくする。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】歩行アシストにおいて、より段差の高い階段をも上ることができるようにする。
【解決手段】通常階段を上る場合、太ももを持ち上げるとともに膝を曲げることで、膝から下の脛の部分を鉛直方向に垂らした状態で足を階段の上に乗せながら上っている(膝曲げ上り)。このため、足を最大上げた場合の高さh1が階段の段差Hよりも高く上がらないと階段を上ることができない。そこで股関節を限界角度θ1まで上げた状態でも足を階段の高さよりも高く上げられない場合には、膝を伸ばすことで足をより高く(h2)上げながら階段を上るようにする(膝伸ばし上り)。
(もっと読む)
可変シート及びこの可変シートを用いた身体装着具
【課題】使用時に外部電源との接続が不要で各種用途に広く使用可能な可変シート及びこの可変シートを用いた身体装着具を提供する。
【解決手段】本発明は、一のフレキシブルシート体2の板面に沿って該シート体2に設けられ、該シート体2を変形させるシート状のポリマーアクチュエータ3と、シート体2の板面に沿ってシート体2に設けられ、ポリマーアクチュエータ3と電気的に接続されたシート状の蓄電素子4と、ポリマーアクチュエータ3と蓄電素子4との間に設けられた制御部6とを備えていることを特徴とする。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者の筋力に応じた歩行支援を行う。
【解決手段】装着型ロボット1(図1)は、超音波センサ35によって装着者の大腿部の筋厚と皮脂厚を測定し、これによって装着者の骨格筋率(体組成情報)を推定する。装着型ロボット1は、予め様々な被験者の骨格筋率の平均値を記憶しており、装着者の骨格筋率が平均値よりも小さい場合は、アシスト力を強めに調節し、平均値よりも大きい場合はアシスト力を弱めに調節する。即ち、装着型ロボット1は、装着者の骨格筋率によって装着者の脚部の筋力を推定し、筋力が弱い場合にはアシスト力を強めに設定し、筋力が強い場合はアシスト力を弱めに設定する。このように、装着型ロボット1は、装着者の脚部の筋力の個人差に応じて自動的にアシスト力を調節するため、装着者は、筋力の個人差によらずに快適な歩行支援を受けることができる。
(もっと読む)
装着型入力装置及び人支援装置及び人支援装置の制御方法
【課題】装着者の動作を安定的且つスムーズに支援することを課題とする。
【解決手段】装着型入力装置100は、装着者12の眼球の動作方向に応じた外眼筋生体信号を検出する外眼筋生体信号検出手段140と、装着者12の頭部の動作方向を検出する頭部動作検出手段150と、装着者12の体幹位置を検出する体幹位置検出手段120と、外眼筋検出信号に基づいて眼球の動作方向を判別する視線方向判別手段170と、頭部動作検出手段150により得られた頭部検出信号と体幹位置検出手段120により得られた体幹位置検出信号との差に基づいて頭部の向きを判別する頭部動作方向判別手段180と、視線方向判別手段170の判別結果による視線方向と頭部動作方向判別手段180の判別結果による頭部動作方向とが一致した場合に当該装着者12が当該方向に移動するものと推定する動作方向推定手段190と、推定結果を人支援装置に入力する入力手段200とを有する。
(もっと読む)
1 - 10 / 41
[ Back to top ]