
国際特許分類[A61F2/68]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 血管へ埋め込み可能なフィルター;補綴;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント;整形外科用具,看護用具または避妊用具;温湿布;目または耳の治療または保護;包帯;被覆用品または吸収性パッド;救急箱 (33,358) | 血管への植え込み可能なフィルター;補綴,すなわち,身体の各部分のための人工的代用品または代替物;身体とそれらを結合するための器具;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント (9,831) | 身体内へ植込まない人工器官 (599) | 操作または制御手段 (206)
国際特許分類[A61F2/68]の下位に属する分類
国際特許分類[A61F2/68]に分類される特許
1 - 10 / 65
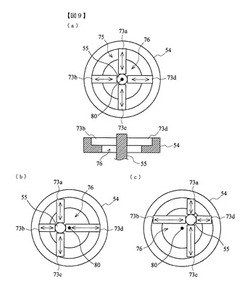
歩行支援装置
【課題】二重関節において歩行アシストに適するように変動過度特性を動的に調整する。
【解決手段】歯車54は、中央にザグリ部75を有する貫通孔76が形成されている。ザグリ部75の内周側には、伸縮する偏心アクチュエータ73a〜73dが十字状に設置されている。偏心アクチュエータ73b、73dは、固定軸55の両側に対向して配置されており、端部は、固定軸55の両側を挟持している。偏心アクチュエータ73a、73cは、偏心アクチュエータ73b、73dの軸線に対して垂直な方向において、固定軸55の両側に対向して配置されており、端部は、固定軸55の両側を挟持している。偏心アクチュエータ73a〜73dを駆動して歯車54の回転軸を中心点80から貫通孔76内の任意の点に偏心させる。
(もっと読む)
アクチュエーター及びアクチュエーターの制御方法

【課題】小型化が可能な電極構造を有するアクチュエーターを提供する。
【解決手段】第1の電極及び第2の電極を有するアクチュエーター素子と、前記アクチュエーター素子に駆動電圧の供給を行う駆動回路と、前記第1の電極と前記第2の電極との間の電位差の検出を行う検出回路と、を含み、前記駆動電圧の供給は、所定の期間における第1の期間内に、前記第1の電極と前記第2の電極との間に電位差が生じるように行われ、前記電位差の検出は、前記所定の期間における前記第1の期間以外の第2の期間内に行われ、前記所定の期間の長さは、前記第1の期間の長さと前記第2の期間との長さとを加えた長さであることを特徴とする。
(もっと読む)
背筋力補助装置
【課題】モータが停止したときにワイヤが伸びてユーザの姿勢が崩れないように、ワイヤを保持するフェイルセーフ機構を備えた背筋力補助装置を提供する。
【解決手段】背筋力補助装置100は、ユーザの腰に装着される腰ハーネス20と、腰ハーネス20に取り付けられているワイヤ巻き上げ器30と、ユーザの背中に装着される背ハーネス10と、ワイヤ巻き上げ器30から伸びて背ハーネス10に固定されているワイヤWaを備える。ワイヤ巻き上げ器30は、ワイヤWaを巻き取るプーリ22と、プーリ22を駆動するモータ34と、プーリ22とモータ34の間で回転力を伝達するウォームギア37とを備えている。ウォームギア37は、逆駆動され難いので、モータ34が停止してもワイヤWaが伸びてユーザの姿勢が崩れることはない。
(もっと読む)
歩行補助装置
【課題】スムースに歩行動作を補助する歩行補助装置を提供する。
【解決手段】歩行補助装置2は、大腿リンク5と下腿リンク9とコントローラ20を備えている。大腿リンク5と下腿リンク9は相互に揺動可能に連結されており、それぞれユーザの大腿と下腿に装着される。コントローラ20は、ユーザの歩幅から下腿リンクの最大揺動角Ag_maxと遊脚時間Tswingを定め、それらに基づいて遊脚軌道を決定する。そして、コントローラ20は、下腿リンクの揺動角が遊脚起動に追従するように下腿リンク9を制御する。ここで、遊脚軌道は、下腿リンクの目標揺動角が予め定められた初期角度Ag_sから単調増加し、最大揺動角Ag_maxへ達した後に単調減少して終端角度Ag_eまで、遊脚時間Tswingをかけて変化する曲線を描く。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】歩行面の種類に応じた歩行支援を行う。
【解決手段】装着型ロボット1は、装着者が歩行のために関節モーメントを発生させる際に、各アシストアクチュエータを駆動して装着者が発生させる関節モーメントを軽減する。装着型ロボット1は、各関節の角度を計算することができ、これら関節の角度とつま先や踵の接地の有無から、装着者が歩行する歩行面の種類を判定する。装着型ロボット1は、判定した歩行面の種類に応じて各アシストアクチュエータの力を調節することにより、平地を歩行しているのと同程度の力加減で階段や坂道を上り下りできるようにする。このように、装着型ロボット1は、各歩行シーンを判定し、歩行シーンに応じたアシスト力を与えることで歩行シーンの違いで人が出力する力を意識することなく歩けるようにする。
(もっと読む)
歩行補助装置
【課題】履き心地、耐久性に優れ、エネルギー効率も良好な歩行補助装置を得ることを目的とする。
【解決手段】装着者の体重を支える補助脚の先端を足装着部の動きに追従する様に接続し、足装着部の立脚時に接地する部分と補助脚先端との、補助脚の伸縮方向の相対変位に基づいて補助脚の伸縮力を制御する様にして制御の元となるセンサを足装着部から外に出し、足装着部を柔軟で快適なものにするとともに、立脚期には補助脚の伸縮をロックすることにより、エネルギー効率を良くした。
(もっと読む)
人工の四肢の機能的な解析を実施するための方法
【課題】人工の四肢の機能的な解析を複雑な測定ハードウエア無しで可能にすること。
【解決手段】人工の四肢は、基本的な機能を実行するためのセット30であって、少なくとも一つの取り外し可能な機能的部分を備えたモジュール方式でデザインされ、特にこの部分が、付加的な機能を可能にする。複雑な外部の装置及び測定デバイスを使用することなく解析を実施するために、前記機能的部分の組み込みに関係する寸法に対応するサイズのセンサー・アセンブリ33’が、前記取り外し可能な機能的部分の代わりに組み込まれる。前記センサー・アセンブリ33’は、次に、前記人工の四肢の基本的な機能のセッティングを最適化するために、前記人工の四肢30の使用中に発生する力、加速度および/またはトルクを測定する。前記センサー・アセンブリ33’は、その後で、前記機能的部分で置き換えられ、最適化されたセッティングが維持される。
(もっと読む)
脚動作支援装置
【課題】簡単・確実な操作でアクチュエータの制御を停止することのできるスイッチを備える脚動作支援装置を提供する。
【解決手段】支援装置は、脚装具、コントローラ、及び、インタフェイスデバイスを備える。脚装具は、ユーザの脚に装着可能に構成されており、脚の関節にトルクを加えるアクチュエータを有する。コントローラは、脚装具のアクチュエータを制御する。インタフェイスデバイスは、コントローラへの指令を入力するためのタッチパネルを有する。さらに、インタフェイスデバイスは、予め定められた力閾値以上の力がタッチパネルに加わったことを検知する力検知器を有している。コントローラは、タッチパネルに前記力閾値以上の力が加わったことが力検知器によって検知されたときにアクチュエータの制御を停止する。
(もっと読む)
動作アシスト装置及び装着具
【課題】アシスト力を発生させるためのアクチュエータが不要で、利用者が装着している状態においてもアシスト機能の遮断が可能な動作アシスト装置を提供する。
【解決手段】互いに揺動可能な複数の背骨部材3を連結してなり、利用者の背中に装着される背骨ユニット2と、利用者の前屈姿勢時に復元力を発生させる作用状態と復元力を発生させない非作用状態とに切り換え可能で、背骨ユニット2に取り付け可能な弾性部材7と、を備えた。
(もっと読む)
筋力補助装置
【課題】従来の装置よりも大きな補助力をユーザに与えることができる筋力補助装置を提供する。
【解決手段】筋力補助装置100は、腰ハーネス20、背ハーネス10、ガイドプーリ16、及び、ワイヤを巻き上げるための巻き上げ器22を有している。腰ハーネス20は、ユーザの腰に装着される。巻き上げ器22は、腰ハーネス20に取り付けられている。背ハーネス10は、ユーザの背に装着される。ガイドプーリ16は、背ハーネス10に支持されており、ユーザの背中後方に配置される。巻き上げ器22から伸びているワイヤWが、ガイドプーリ16を介してユーザの背の上部に相当する位置で背ハーネス10に固定されている。ガイドプーリ16によって背の上部を後方から引っ張るようにワイヤWを配索するので、背屈方向に大きなモーメントをユーザに与えることができる。
(もっと読む)
1 - 10 / 65
[ Back to top ]