
国際特許分類[A61F2/72]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 血管へ埋め込み可能なフィルター;補綴;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント;整形外科用具,看護用具または避妊用具;温湿布;目または耳の治療または保護;包帯;被覆用品または吸収性パッド;救急箱 (33,358) | 血管への植え込み可能なフィルター;補綴,すなわち,身体の各部分のための人工的代用品または代替物;身体とそれらを結合するための器具;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント (9,831) | 身体内へ植込まない人工器官 (599) | 操作または制御手段 (206) | 電気的なもの (118) | 生体電気的制御,例.筋電によるもの (45)
国際特許分類[A61F2/72]に分類される特許
1 - 10 / 45
腰部補助装置
【課題】利用者の左右の下肢の状態との関係を考慮して適切に腰部を補助する腰部補助装置を提供する。
【解決手段】腰部補助装置の右アクチュエータ40は、右角度検出部で検出された右屈曲角度に応じて右アクチュエータによる右起立力が制御され、左アクチュエータ42は、左角度検出部で検出された左屈曲角度に応じて左アクチュエータによる左起立力が制御されている。
(もっと読む)
歩行支援装置、及び歩行支援プログラム

【課題】歩き方が異なる場合であっても、一定の負担感での歩行支援を行う。
【解決手段】1歩行周期の間における装着者の負担量として角力積(関節モーメントの時間積分値)に着目し、歩行状態によらずに装着者の1歩行周期における角力積が一定となるように各関節のアシストを行う。すなわち、基準となる歩行状態の1歩行周期における角力積から、歩行支援装置がアシストした角力積を除いた角力積を基準角力積zとし、歩行パラメータの値が変化する(歩き方が変わる)ことで角力積が増加したとしても、装着者が負担すべき角力積が基準角力積zと均しくなるようにアシスト率βを設定する。これにより歩行パラメータの値が変わっても、一定の基準角力積zの負担感で歩くことが可能になる。
(もっと読む)
装着式動作補助装置
【課題】本発明は両腕で運搬物を抱えながら安定的に移動できることを課題とする。
【解決手段】動作補助装置10は、装着者12の上肢に装着される上肢フレーム14と、装着者12の下肢に装着される下肢フレーム19と、装着者12の腰に装着される腰フレーム30と有する。上肢フレーム14は、腰フレーム30の上方に形成され、腰フレーム30の前側より上方に延在する垂直フレーム15と、垂直フレーム15の上端より肩幅方向に横架された肩フレーム16A、16Bとを有する。肩フレーム16A、16Bには、運搬物を持ち上げる際に両腕の動作をアシストする上肢駆動部17A,17Bが前後方向に回動可能に設けられている。従って、肩フレーム16A、16Bに支持される上肢駆動部17A,17Bの質量は、上肢フレーム14に支持されるため、装着者12には上肢フレーム14及び上肢駆動部17A,17Bの重さを感じることなく、作業が行える。
(もっと読む)
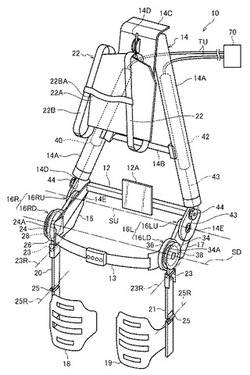
装着式動作補助装置
【課題】装着者の負担を軽減して作業効率を高める装着式動作補助装置を提供する。
【解決手段】装着者12は、装着式動作補助装置10が装着された状態で防護服14及び頭部保護具16を装着する。動作補助装置10は、腰支持体30に当該装着者12の上体を囲むように形成された上体フレーム210が取り付けられている。上体フレーム210は、当該装着者12の右側に位置する第1上フレーム220と、当該装着者12の左側に位置する第2上フレーム230と、第1上フレーム220と第2上フレーム230との間を連結する連結部240とを有する。防護服14を着用する際は、第1上フレーム220及び第2上フレーム230の肩支持部222、232が防護服14の肩部内側に当接する。従って、防護服14の質量は、腰支持体30に固定された上体フレーム210に支持され、装着者12には作用しない。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】歩行アシストにおいて、より段差の高い階段をも上ることができるようにする。
【解決手段】通常階段を上る場合、太ももを持ち上げるとともに膝を曲げることで、膝から下の脛の部分を鉛直方向に垂らした状態で足を階段の上に乗せながら上っている(膝曲げ上り)。このため、足を最大上げた場合の高さh1が階段の段差Hよりも高く上がらないと階段を上ることができない。そこで股関節を限界角度θ1まで上げた状態でも足を階段の高さよりも高く上げられない場合には、膝を伸ばすことで足をより高く(h2)上げながら階段を上るようにする(膝伸ばし上り)。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】歩行面の種類に応じた歩行支援を行う。
【解決手段】装着型ロボット1は、装着者が歩行のために関節モーメントを発生させる際に、各アシストアクチュエータを駆動して装着者が発生させる関節モーメントを軽減する。装着型ロボット1は、各関節の角度を計算することができ、これら関節の角度とつま先や踵の接地の有無から、装着者が歩行する歩行面の種類を判定する。装着型ロボット1は、判定した歩行面の種類に応じて各アシストアクチュエータの力を調節することにより、平地を歩行しているのと同程度の力加減で階段や坂道を上り下りできるようにする。このように、装着型ロボット1は、各歩行シーンを判定し、歩行シーンに応じたアシスト力を与えることで歩行シーンの違いで人が出力する力を意識することなく歩けるようにする。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者の筋力に応じた歩行支援を行う。
【解決手段】装着型ロボット1(図1)は、超音波センサ35によって装着者の大腿部の筋厚と皮脂厚を測定し、これによって装着者の骨格筋率(体組成情報)を推定する。装着型ロボット1は、予め様々な被験者の骨格筋率の平均値を記憶しており、装着者の骨格筋率が平均値よりも小さい場合は、アシスト力を強めに調節し、平均値よりも大きい場合はアシスト力を弱めに調節する。即ち、装着型ロボット1は、装着者の骨格筋率によって装着者の脚部の筋力を推定し、筋力が弱い場合にはアシスト力を強めに設定し、筋力が強い場合はアシスト力を弱めに設定する。このように、装着型ロボット1は、装着者の脚部の筋力の個人差に応じて自動的にアシスト力を調節するため、装着者は、筋力の個人差によらずに快適な歩行支援を受けることができる。
(もっと読む)
装着式動作補助装置、そのインタフェース装置及びプログラム
【課題】パラメータ設定を容易に行うことのできる装着式動作補助装置、そのインタフェース装置及びプログラムの提供。
【解決手段】装着式動作補助装置は、動力を付与する駆動源132と、生体電位信号に応じた動力を前記駆動源に発生させる第1指令信号を生成する随意制御手段111と、装着者1のタスクのフェーズを特定し、このフェーズに応じた動力を前記駆動源に発生させる第2指令信号を生成する自律制御手段112と、前記第1及び第2指令信号に基づいて駆動電流を生成し、前記駆動源に供給する生成手段131と、前記動力の強弱に対応する座標軸を表示する画面を有する表示手段141と、前記画面内の指定された位置の座標を検出する検出手段143と、前記検出された座標に対応するパラメータを抽出し、抽出したパラメータを随意制御手段111に設定する設定手段121と、を備える。
(もっと読む)
装着型入力装置及び人支援装置及び人支援装置の制御方法
【課題】装着者の動作を安定的且つスムーズに支援することを課題とする。
【解決手段】装着型入力装置100は、装着者12の眼球の動作方向に応じた外眼筋生体信号を検出する外眼筋生体信号検出手段140と、装着者12の頭部の動作方向を検出する頭部動作検出手段150と、装着者12の体幹位置を検出する体幹位置検出手段120と、外眼筋検出信号に基づいて眼球の動作方向を判別する視線方向判別手段170と、頭部動作検出手段150により得られた頭部検出信号と体幹位置検出手段120により得られた体幹位置検出信号との差に基づいて頭部の向きを判別する頭部動作方向判別手段180と、視線方向判別手段170の判別結果による視線方向と頭部動作方向判別手段180の判別結果による頭部動作方向とが一致した場合に当該装着者12が当該方向に移動するものと推定する動作方向推定手段190と、推定結果を人支援装置に入力する入力手段200とを有する。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者の歩行支援に際して装着者に与える違和感を低減する。
【解決手段】本実施の形態では、歩容が変化する場合の一例として、装着型ロボット1の装着者がエスカレータ300に乗る場合を考える。装着者は、エスカレータ300に乗ると、踏板上に立つか、歩くかして歩容が変化するが、エスカレータ300を降りた後は、乗る前と同様の歩き方をすると考えられる。そこで、装着型ロボット1は、エスカレータ300に乗る前に装着者の歩行を支援しつつ、歩行情報を検出してアーカイブに記憶しておき、装着者がエスカレータ300から降りて再び歩き始める際に当該歩行情報を用いて歩行支援を行う。装着型ロボット1は、この制御方法により、装着者がエスカレータ300を降りて歩く際の歩容を推定して先回りして制御するため、装着者に与える違和感を低減することができる。
(もっと読む)
1 - 10 / 45
[ Back to top ]