
国際特許分類[A61H3/00]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 物理的な治療装置,例.人体のつぼの位置を検出または刺激する装置;人工呼吸;マッサージ;特別な治療または人体の特定の部分のための入浴装置 (8,757) | 病人または身体障害者歩行補助器具 (875)
国際特許分類[A61H3/00]の下位に属する分類
松葉づえ (51)
病人または身体障害者のための車輪のついた歩行補助具 (197)
盲目者のための歩行補助具 (65)
国際特許分類[A61H3/00]に分類される特許
101 - 110 / 562
装着式動作補助装置、そのインタフェース装置及びプログラム
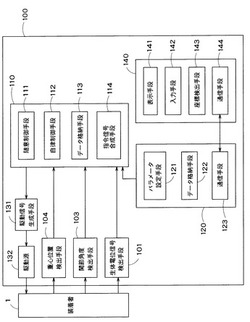
【課題】パラメータ設定を容易に行うことのできる装着式動作補助装置、そのインタフェース装置及びプログラムの提供。
【解決手段】装着式動作補助装置は、動力を付与する駆動源132と、生体電位信号に応じた動力を前記駆動源に発生させる第1指令信号を生成する随意制御手段111と、装着者1のタスクのフェーズを特定し、このフェーズに応じた動力を前記駆動源に発生させる第2指令信号を生成する自律制御手段112と、前記第1及び第2指令信号に基づいて駆動電流を生成し、前記駆動源に供給する生成手段131と、前記動力の強弱に対応する座標軸を表示する画面を有する表示手段141と、前記画面内の指定された位置の座標を検出する検出手段143と、前記検出された座標に対応するパラメータを抽出し、抽出したパラメータを随意制御手段111に設定する設定手段121と、を備える。
(もっと読む)
歩行補助装置

【課題】足の踏み替え時における違和感を抑えることを目的とする。
【解決手段】着座部材は、利用者を下側から支持する支持部材61と、支持部材61に支持された利用者の鼠径部に当接するように設けられ、支持部材61に対して少なくとも前後方向に移動可能となるように支持部材61に可動に支持された可動部材63と、可動部材63と支持部材61との間に設けられ、可動部材63に利用者の鼠径部からかかる力に応じて変形する弾性部材(引張コイルバネ71)と、を備えている。
(もっと読む)
脚装具
【課題】大腿リンクと下腿リンクの間に皮膚や衣服が挟まれ難い構造の脚装具を提供する。
【解決手段】脚装具100は、ユーザの大腿に取り付けられる大腿リンク20と、ユーザの下腿に取り付けられ、膝関節の側方で大腿リンク20と揺動可能に連結している下腿リンク30を備える。この脚装具100は、直立姿勢のユーザに装着された脚装具100を側方から観測したときに、大腿リンク20と下腿リンク30の連結部12においてそれらのリンクが膝裏側でなす角度が180度以上となるように構成されている。ユーザが膝を屈曲させても、大腿リンク20と下腿リンク30が膝裏側でなす角度は90度以上となり、皮膚や衣服が挟まれ難い。
(もっと読む)
装着式動作補助装置及び供給電力の制御方法
【課題】電力を必要とする状況において、適切な量の電力のみが使用されるようにして、省エネ効率を向上させることができる装着式動作補助装置、及び供給電力の制御方法を提供する。
【解決手段】補助力を付与するためのモータを有する補助力付与器具と、装着者の意思検出手段と、モータの制御信号を生成する補助力付与制御手段と、モータに対して指示信号を出力するモータ駆動回路と、を備えた装着式動作補助装置において、バッテリにより供給される電力を、意思検出手段、補助力付与制御手段及びモータ駆動回路に対して供給するための第1のDC/DCコンバータと、バッテリにより供給される電力を、モータに対して供給するための第2のDC/DCコンバータと、装着者が動作を行おうとする意思が検出されない期間にモータ側への電力供給回路が遮断されるように供給電力のオン/オフ制御を行う電力供給制御手段と、を備える。
(もっと読む)
床反力計測装置及び接地検知装置
【課題】人の足が受ける床反力を精度よく計測する床反力計測装置を提供する。
【解決手段】床反力計測装置10は、第1荷重センサ14と第2荷重センサ16を備える。第1荷重センサ14は、ユーザが履く靴90の中であってユーザの足裏に対応する領域に配置される。第2荷重センサ16は、靴90の中であってユーザの足の甲に対応する領域に配置される。第1荷重センサ14によって計測された荷重から第2荷重センサ16によって計測された荷重を減じることによって、第1荷重センサに加わっているオフセット荷重をキャンセルすることができ、床反力を正確に計測することが可能となる。
(もっと読む)
歩行リハビリ装置
【課題】歩行能力の回復レベルの変化に適応する歩行リハビリ装置を提供する。
【解決手段】歩行リハビリ装置は、大腿リンク、大腿リンクに連結されている下腿リンク、下腿リンクを回転させるモータ、下腿リンクを装着した脚の足裏に加わる荷重を検知する荷重センサ、及び、コントローラを備える。大腿リンクと下腿リンクは夫々ユーザの大腿と下腿に取り付けられる。コントローラは、歩行時の離地から着地までの1ステップに相当する下腿リンク回転角の目標パターンに追従するようにモータを制御する。さらにコントローラは、荷重センサが検知する荷重が第1荷重閾値を越えた後に第2荷重閾値を下回ったことをトリガとしてモータ制御を開始する。また、コントローラは、下腿リンクを装着した脚が接地しているときに受ける荷重、下腿リンクを装着した脚の歩幅、大腿リンクの回転角速度の少なくも一つの値に基づいて第1荷重閾値と第2荷重閾値を決定する。
(もっと読む)
装着型入力装置及び人支援装置及び人支援装置の制御方法
【課題】装着者の動作を安定的且つスムーズに支援することを課題とする。
【解決手段】装着型入力装置100は、装着者12の眼球の動作方向に応じた外眼筋生体信号を検出する外眼筋生体信号検出手段140と、装着者12の頭部の動作方向を検出する頭部動作検出手段150と、装着者12の体幹位置を検出する体幹位置検出手段120と、外眼筋検出信号に基づいて眼球の動作方向を判別する視線方向判別手段170と、頭部動作検出手段150により得られた頭部検出信号と体幹位置検出手段120により得られた体幹位置検出信号との差に基づいて頭部の向きを判別する頭部動作方向判別手段180と、視線方向判別手段170の判別結果による視線方向と頭部動作方向判別手段180の判別結果による頭部動作方向とが一致した場合に当該装着者12が当該方向に移動するものと推定する動作方向推定手段190と、推定結果を人支援装置に入力する入力手段200とを有する。
(もっと読む)
画像認識装置、装着型ロボット、及び画像認識プログラム
【課題】画像認識用のカメラの高さを自動的に検出する。
【解決手段】カメラ位置22には、前方斜め下に向けた画像認識装置用の撮像カメラ5が設置されており、その上方の光源位置21には、撮像カメラ5の画面フレーム31の内部に投影像26を投影する光源装置4が設置されている。装着型ロボットに搭載された画像認識装置は、画面フレーム31の下端と投影像26の下端との距離である投影像オフセットx2を画像データで計測し、投影像オフセットx2とカメラ高さy2を対応させた対応データマップや、あるいは計算によりカメラ高さy2を取得する。このようにして得られたカメラ高さy2は、パラメータとして記憶装置に記憶され、画像認識装置で段差などの認識するのに使用される。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者の意図にかかわらず、適切な歩行支援を行う。
【解決手段】装着者は、装着型ロボット1を装着して駅のホーム70の上を歩行し、装着型ロボット1は、装着者の歩行を支援している。ホーム70の破線から端部よりの領域には、危険領域80が設定されている。危険領域80の上部には、照明100、100、…が設置されており、照明100の発する照明光には、危険領域を示す危険領域情報が含まれている。装着型ロボット1は、危険領域情報を受信することにより、現在位置が危険領域80であることを認識し、画像認識によって前方の状態を確認する。画像認識によって、ホームの端部の段差が検出された場合、装着型ロボット1は、装着者の前進を阻止する。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者に与える違和感を低減しつつ、装着性の優れた歩行支援装置を提供する。
【解決手段】装着型ロボット1は、装着性を向上させるために筋電センサは用いずに、装着者の運動を検知して動作を制御する。このように装着者の運動を検知して動作すると1次遅れの制御となり、装着者に違和感が生じる原因となるが、装着型ロボット1は、予め装着者の動きを先読みして1次遅れの制御を補完することにより、ユーザに与える違和感を緩和する。具体的な先読み場面としては、エスカレータや動く歩道など、歩行基準面が移動する場合に、装着者が移動する歩行面上で歩行を継続するか否かを推定して先読みし、その結果によって、歩行を継続する場合の制御と、歩行を継続しない場合の制御に切り換える。
(もっと読む)
101 - 110 / 562
[ Back to top ]