
国際特許分類[A61H3/00]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 物理的な治療装置,例.人体のつぼの位置を検出または刺激する装置;人工呼吸;マッサージ;特別な治療または人体の特定の部分のための入浴装置 (8,757) | 病人または身体障害者歩行補助器具 (875)
国際特許分類[A61H3/00]の下位に属する分類
松葉づえ (51)
病人または身体障害者のための車輪のついた歩行補助具 (197)
盲目者のための歩行補助具 (65)
国際特許分類[A61H3/00]に分類される特許
11 - 20 / 562
モータ制御装置、歩行補助装置及びモータ制御方法
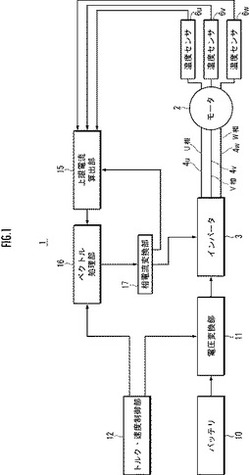
【課題】モータコイルの過熱を防止するモータ制御装置において、コイル温度が上限を超えないことを保証しつつ、コイル温度の上限を保証上限温度に十分近い値に設定して、コイル電流の制限に因るモータ性能の低下を抑止する。
【解決手段】上限電流算出部15は、温度センサ6u,6v,6wが検出した各相コイルの温度に基づいて各相において第1の所定時間後のコイル温度が上限温度以下に留まる上限値を、第1の所定時間より短い第2の所定時間の経過ごとに算出する。ベクトル処理部16は、目標コイル電流に対応する目標ベクトルの長さを、上限電流算出部15が算出した各相の上限値の内の最小のものに対応する長さ以内になるように補正する。相電流変換部17は、補正後の目標ベクトルに基づいて各相電流値を算出し、インバータ3を介してモータ2の各相電流を制御する。
(もっと読む)
脚力補助装置

【課題】 簡単な構造で脚力の補助ができ且つ持ち運びしやすいこと。
【解決手段】 この脚力補助装置100は、ユーザの足に靴の上から巻き付けることでユーザの足に固定する足固定部1と、足固定部1にその一端が連結されたゴム紐2と、ゴム紐2の他端が連結され且つユーザの体にタスキ掛けできる寸法の環状タスキ3とから構成される。ユーザが脚を上げるとき、弾性部材により脚が上に引っ張られるので、脚を曲げた途端に弾性力が作用し、少ない力で脚を上げることができる。ユーザが脚を下げるときは、脚を伸ばす動作によりゴム紐2を引っ張ることになるので小さい力で簡単に脚を伸ばすことができる。持ち運び時には前記足固定部1、ゴム紐2及び環状バンド3を適宜分割して或いはゴム紐2で連結した状態で纏め、コンパクトにできる。このため、持ち運びに便利である。
(もっと読む)
歩行訓練装置
【課題】本発明は、歩行訓練を行なう際の座位または立位の姿勢に応じて安定した補助を行えることを課題とする。
【解決手段】歩行訓練装置10は、把持部20と、複数の支持脚30A〜30Dと、車輪40と、高さ調整機構50A〜50Dと、一対の操作部60A,60Bとを有する。操作部60A,60Bは、上下方向に操作される操作レバー62と、操作レバー62を回動可能に支持するブラケット64と、操作レバー62の回動変位に応じた変位量を高さ調整機構50A〜50Dに伝達する伝達部材66とを有する。高さ調整機構50A〜50Dは、操作部60A,60Bが同時に操作されることにより歩行訓練者が座位状態から立上がる訓練を行なう際には、把持部20の高さ位置を座位状態で把持しやすい高さ位置に降下させ、また歩行訓練者が立位状態で歩行訓練する際には把持部20の高さ位置を立位状態で把持しやすい高さ位置に上昇させることができる。
(もっと読む)
歩行補助システム
【課題】ユーザが容易に着脱できる歩行補助装置を提供すること
【解決手段】本発明にかかる歩行補助システムは、歩行補助装置10と、歩行補助装置10のユーザHが足に装着するインナーシューズ30とを備えた歩行補助システムである。歩行補助装置10は、腿部に装着される装具12と、装具12と連結され、地面と接触する足底ユニット22と、を備える。足底ユニット22には、その後端に凹部223が設けられ、インナーシューズ30には、その後端に凹部223と嵌合する凸部35が設けられる。
(もっと読む)
足関節駆動による歩行支援機能的電気刺激システム
【課題】より自然な歩行に近づけることを可能にする機能的電気刺激システムを提供する。
【解決手段】歩行支援のための機能的電気刺激システムであって、足関節周囲筋群の複数の各筋を個別に電気刺激して足関節駆動力を付与する駆動力付与装置と、下肢に装着して電気刺激を行う刺激電極サポータ1,5と、脚接地を検出するセンサー3,4と関節角度を検出するセンサー7,8,12,13を備えており、受動歩行様式の骨格モデル及び筋骨格数学モデルによりオンラインで筋出力を推定し、推定した筋出力を各筋に対応した刺激パターンに変換し、刺激電極サポータにより、各筋に対応した刺激パターンで各筋を個別に電気刺激する。
(もっと読む)
歩行支援装置及びその初期設定方法
【課題】使用者が安定した状態で角度検出センサの初期設定を行うことができる歩行支援装置を提供する。
【解決手段】歩行支援装置は、使用者の腿部に装着され、インクリメンタル型の角度検出センサ7を上側のリンクと下側のリンクとの関節部に有する歩行支援装置であって、関節部の伸展状態を検出する第1の検出手段13と、第1の検出手段13によって検出された関節部の伸展状態に基づいて、角度検出センサ7の初期設定を行う初期設定手段14と、を備える。
(もっと読む)
歩行補助システム
【課題】麻痺者の足の拘縮を矯正する歩行補助システムを提供すること
【解決手段】本発明にかかる歩行補助システムは、歩行補助装置10と、歩行補助装置10のユーザHが足に装着するインナーシューズ30とを備えた歩行補助システムである。歩行補助装置10は、腿部に装着される装具12と、装具12と連結され、地面と接触する足底ユニット22と、足底ユニット22が地面と接触する際にかかる力を検出する検出センサと、検出センサの検出結果に応じて、装具12の動きを制御するコントローラ11と、を備える。インナーシューズ30は、ユーザのつま先の拘縮部分を底部34側に付勢することにより拘縮を抑制し、つま先の伸長状態を維持するつま先部31を有する。
(もっと読む)
歩行支援装置及びその制御方法
【課題】使用者の歩容の異常を検出することができる歩行支援装置を提供する。
【解決手段】本発明の一形態に係る歩行支援装置1は、使用者の腿部に装着され、使用者の歩行を支援する歩行支援装置であって、使用者の歩行状態を検出する検出手段7と、検出手段7の検出結果に基づいて算出した、遊脚動作時間と遊脚完了予測時間とに基づいて、使用者の歩容が正常か否かを判定する歩容判定手段93と、を備える。このとき、遊脚動作時間と遊脚完了予測時間との差が0以下であると、制御手段92を制御して使用者の膝が伸展するように駆動手段6を動作させる。
(もっと読む)
歩行補助装置及びその制御装置・方法・プログラム
【課題】歩行動作中の異常発生時における安全性を向上させる。
【解決手段】制御装置2は、使用者の脚部に装着され使用者の歩行動作を補助する歩行補助装置1に備えられる。制御装置2は、歩行動作の異常を検出する異常検出部11と、異常時における膝関節部3の角速度を検出する膝角速度検出部12と、異常時において、膝角速度検出部12により検出された角速度に比例するトルクであって膝関節部3が屈曲方向へ動作する際の角速度を低減させる保全トルクを発生させるトルク制御部13とを備える。
(もっと読む)
歩行補助装置
【課題】人体に装着される歩行補助装置において、関節機構との締結構造、意匠性等を損なうことなく、フレームの長さを使用者の体型に合わせて容易に調整できるようにする。
【解決手段】歩行補助装置は、使用者の体に装着され、使用者の歩行を補助するものである。歩行補助装置は、使用者の下半身の関節に対応する複数の関節機構と、関節機構と締結する中空状の部材からなるフレーム14とを備える。フレーム14の端部25,26には、使用者の体型に合わせて長さを調整するために切断される調整代28が設けられる。フレーム14の内部の調整代28に相当する部分には、関節機構と締結する締結構造30が形成される。締結構造30は、調整代28の全域に渡って同一の断面形状を有する。
(もっと読む)
11 - 20 / 562
[ Back to top ]