
国際特許分類[A61H3/02]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 物理的な治療装置,例.人体のつぼの位置を検出または刺激する装置;人工呼吸;マッサージ;特別な治療または人体の特定の部分のための入浴装置 (8,757) | 病人または身体障害者歩行補助器具 (875) | 松葉づえ (51)
国際特許分類[A61H3/02]に分類される特許
1 - 10 / 51
偏心回動連結された2本杖
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
杖及び杖システム
【課題】杖使用者の杖に対する依存度や利用に関する情報を収集でき、杖の利用の適正を客観的に判定することが可能になる。
【解決手段】制御部153は、杖を用いての歩行中か否かを圧力センサ152からの信号により判定し、歩行中であると判定した場合、利用者の体重のどの程度の負担が杖にかかっているかを示す圧力値を制御部153内のメモリに順次記憶していく。
(もっと読む)
歩行を補助するための杖

【課題】従来の歩行補助杖、松葉杖に比べ、地面に杖をついて体重を支持する際の衝撃を、より和らげる機構を実現する。
【解決手段】歩行を補助するための杖であって、杖を地面につく際の衝撃を緩衝・反発する機構を備えた杖であり、杖は、固定することによって、衝撃を緩衝・反発する機構による緩衝・反発効果を発揮させない機構も備えており、利用者が、固定するか固定しないかによって、衝撃を緩衝・反発する機構による緩衝・反発効果の有無を選択して、杖を利用することができる。
(もっと読む)
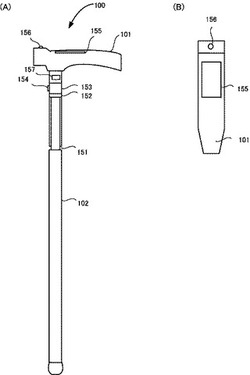
松葉杖形歩行支援機械
【課題】下肢に障害があり移動を行うことができない人の歩行を支援する歩行支援機械のエネルギー消費の低減と乗り心地を向上する。
【解決手段】人の歩行を支援するための歩行支援機械(100)は、使用者が手で操作し且つ自身の体重を預けることができる一対の松葉杖(1)と、伸縮可能な一対の伸縮リンク(3)と、伸縮リンクの下端部に取り付けられていて且つその上に使用者の足を載せるための足底板(9)と、伸縮リンクを伸縮させることが可能なアクチュエータ(6)と、制御装置(30)とを具備する。各松葉杖と各伸縮リンクはそれぞれ、回転可能な対偶(2)を介して連結される。歩行支援機械は、伸縮リンクが伸縮することにより、使用者の歩行を支援する。歩行支援機械は、上部が伸縮リンクに連結し、下部が足底板に連結する腱リンク(40)を具備しており、腱リンクは伸縮自在である。
(もっと読む)
杖
【課題】耐衝撃性に優れた十分な強度を有し、安全性、耐久性、および補修性に優れるうえ、軽量であり、しかも高い剛性を備えるようにする。
【解決手段】シャフト部(4)とグリップ部とを有する杖である。シャフト部(4)は高強度有機繊維強化樹脂層(31)と炭素繊維強化樹脂層(32)とを備える。炭素繊維強化樹脂層(32)の外周面と内周面に高強度有機繊維強化樹脂層(31)が一体的に積層してある。最も内側の高強度有機繊維強化樹脂層(31a)のさらに内側にガラス繊維強化樹脂層(33a)を備える。最も外側の高強度有機繊維強化樹脂層(31b)のさらに外側にガラス繊維強化樹脂層(33b)を備える。
(もっと読む)
杖、杖に付けるひざ当て部品、足保持部品、および、杖の使用方法
【課題】片足に障害、例えば、ねんざや、軽い麻痺の足を有する人が、その足に体重負担をかけることなく、前進歩行がしやすくするための杖を実現する。
【解決手段】持ち手100と、足を挿入する開口107を有する足保持部103と、持ち手100と足保持部103とを連結する連結部101と、からなり、足保持部103の底には、下方に向かって凸部を有し、連結部には、ひざ当て部105を有することを特徴とする杖110とする。さらには、持ち手100の長手方向と、足保持部103への足の挿入方向とが、垂直である杖110とする。
(もっと読む)
人体静電気除去杖
【課題】人体に帯電した健康に有害な働きをする静電気を大地に放電除去する効果があり人体生理作用を自然本来の状態たらしめ健康増進や病気の自然治癒力増強に役立つ人体表面および体内に発生帯電した静電気を大地に放電除去することができる杖を提供する。
【解決手段】杖本体2に針金3や導電性ゴムなどの良導体を結合させ構成して杖全体を電気的良導体たらしめる。あるいは杖本体2が金属などの電気的良導体の場合に、杖全体を電気的良導体にするためには、上端手握り部品の部材と地面に接触する下端部の接地部品の部材は導電性ゴムなど電気的良導体の部材を夫々杖本体2の両端に嵌合させて構成する。
(もっと読む)
歩行補助器具
【課題】負傷していない足にかかる負荷を減らし、使用時の安定性を維持する、松葉杖に取り付け可能な歩行補助器具を提供する。
【解決手段】松葉杖に取り付け可能な本体4を備えた歩行補助器具9であって、この歩行補助器具9は、足を負傷した使用者のための支持補助器具となり、使用者はより容易に動き回れるようになる。この歩行補助器具9によって、補助器具それ自体と使用者の両方の安定性を維持しながらの動きが可能になる。歩行補助器具9は使用者の体重を支えるのに十分な強靭さを有し、また歩行補助器具9によって移動するために松葉杖2を1本しか必要としないことから、通常歩行に近い歩行運動が可能になる。また、歩行補助器具9は調節可能であることから、身長及び体重が異なる様々な使用者が使用することができる。
(もっと読む)
歩行補助具
【課題】体の体格や使用目的に応じて全長を伸縮可能にするとともに、下端側から
突出する滑り止め部材を突出状態および収納状態に切換える伝達ロッドの長さを調
整可能にする。
【解決手段】上端に握り部材18を有する支持部材10を上側筒体11と下側筒体
12とから構成し、下側筒体12の挿通孔23と上側筒体11の4つのロック孔2
4の内の何れかとにロックピン20を挿通させ、これによって長さ調整した状態で
ロックを行なう。また伝達ロッド41に設けられたピン42を伝達スリーブ40の
摺動溝43の4つの係合凹部44の内の何れかの係合部凹部44に係合させ、これ
によって支持部材10の伸長に合わせて伝達ロッド41を伸長調整する。
(もっと読む)
倒立振子型移動体
【課題】他の移動体との連携動作が可能な倒立振子型移動体を提供すること。
【解決手段】通信部701(情報取得手段)により、他移動体の現在の状態(姿勢)を表す状態情報を取得する。姿勢制御演算部80(移動制御手段)は、前記状態情報に基づき、前記他移動体の現在の状態(姿勢)に対する自移動体(倒立振子型移動体)の状態(姿勢)が前記自移動体と前記他移動体とを連携動作させるために規定された所定の条件を満たすように、前記自移動体の移動を制御する。
(もっと読む)
1 - 10 / 51
[ Back to top ]