
国際特許分類[A61H3/04]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 物理的な治療装置,例.人体のつぼの位置を検出または刺激する装置;人工呼吸;マッサージ;特別な治療または人体の特定の部分のための入浴装置 (8,757) | 病人または身体障害者歩行補助器具 (875) | 病人または身体障害者のための車輪のついた歩行補助具 (197)
国際特許分類[A61H3/04]に分類される特許
31 - 40 / 197
電動式歩行器
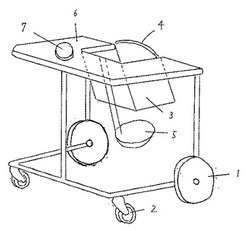
【課題】従来ある電動車いすでは、障害の重い者にとって決して操作しやすいものではなかった。それは、座位姿勢は覚醒レベルを高めにくく、頭部のコントロールが難しく、また上肢でのジョイスティック操作が困難なためである。
【解決手段】立位姿勢を保持するために、テーブル、胸当て、サドルを有する歩行器の後輪に電動ユニットを取り付ける。簡単に操作できるスイッチをテーブル上に取り付ける。この電動式歩行器を使用すれば、実用的な移動手段を持たない障害の重い者でも、覚醒レベルを高めやすく、頭部のコントロールや上肢の操作を行いやすい立位姿勢で、簡単なスイッチを押すことで移動することが達成できる。
(もっと読む)
自転歩行器

【課題】使用者の足の動きを歩行動作に規定して車輪を回転させることで、本来の歩行動作に則した足の動きが体現できる歩行訓練を促すと同時に、車輪移動により歩行動作移動の助勢をする歩行器の提供。
【解決手段】左右のフレーム11を連結した主車輪51を備える歩行器であり、前記主車輪51に回転を伝えるクランク棒31と、該クランク棒31にその摺動を規定限度内に許しながら回転を与える下部摺動溝23と倶に該下部摺動溝23の上側に前記フレームとの間に回動と規定限度内の摺動を許す係合を保持する振り脚21と、該振り脚21の下端に設けられる足を載せる踏板22とからなり、左右の前記踏板22の動作が歩行動作の足の動きに近似され、該踏板22の周期運動と前記主車輪51の回転とを連動させる。
(もっと読む)
歩行器
【課題】使用時以外に小型化が可能な歩行器を提供する。
【解決手段】歩行器は、一対の前脚と、複数の前脚を連結する少なくとも1つの連結部材と、一対の後脚と、一対の前脚と後脚とをそれぞれ連結し、使用者の手で把持可能な一対の把持部材と、を備え、前脚及び後脚は、それぞれ、棒状の主軸部121aと、この主軸の下端部に着脱自在に取り付けられ、伸縮が可能な棒状の調整部122aと、調整部122aを主軸部121a側に配置することで前脚及び後脚の長さを短くすることが可能な収納機構と、を備えている。
(もっと読む)
手押し車
【課題】本発明は、折畳み、展開操作が容易に行うことができ、かつ腰の曲がった高齢者にも適した手押し車100、200を提供することを目的とする。
【解決手段】主フレーム10と、ハンドルフレーム20と、前輪フレーム30と、後輪フレーム40とを備えた手押し車100であって、ハンドルフレーム20に、主フレーム10に挿通するスライド部21を設け、スライド部21と主フレーム10に、スライド部21を固定するハンドル固定部26を設けたハンドル高さ調整手段と、主フレーム10に固定したフック部材12と、主フレーム10の背面に配設した操作レバー50と、操作レバー50をフック部材12に回転掛止するロック部57と、操作レバー50に連結した作動リンク部材51と、前輪フレーム30と後輪フレーム40の前後方向を略水平に連結する側面第1リンク部材52と、側面第2リンク部材53とで構成した折畳み展開手段とを備えたことを特徴とする。
(もっと読む)
ロボット型ステッキ装置
【課題】ユーザーの直立位置における歩行及び起立を能動的に援助するロボット型ステッキを提供する。
【解決手段】ロボット型ステッキ100は、グリップハンドル110と、グリップハンドル110から延在するステッキ本体111と、ステッキ本体111の第2端部に結合された動力付き全方向式ホイール134と、バランス制御センサと、コントローラモジュールと、を包含する。バランス制御センサは、ロボット型ステッキ100の向きに対応したバランス信号を供給する。コントローラモジュールは、バランス制御センサからバランス信号を受信し、且つ、バランス信号及び倒立振り子制御アルゴリズムに基づいて動力付き全方向式ホイール134のバランス速度を算出する。コントローラモジュールは、算出されたバランス速度に従って、動力付き全方向式ホイール134に駆動信号を更に供給可能であり、ロボット型ステッキ100を実質的に直立した位置に維持する。
(もっと読む)
身体補助ロボット装置及びシステム
【課題】座、起立、及び歩行が制限された状態の人々に対して移動性を提供する身体補助ロボット装置及びシステムを提供する。
【解決手段】直立支持部材112を含むフレーム110と、直立支持部材と摺動可能に係合した横方向部材130と、横方向部材と摺動可能に係合したハンドル132と、直立支持部材及び横方向部材に結合した上昇アクチュエータ124と、横方向部材及びハンドルに結合した横方向アクチュエータ126と、を包含可能である。上昇アクチュエータが横方向部材を並進させると共に横方向アクチュエータがハンドルを並進させることにより、ユーザーを起立位置と非起立位置の間において移動させる構成とする。
(もっと読む)
歩行補助器
【課題】ハンドル部の位置を自在に調節し、使用者が無理のない姿勢で安全に歩行可能な歩行補助器を提供する。
【解決手段】歩行補助器は、車台1と、その上部に取り付けられたハンドル部2とを含み、車台1に対するハンドル部2の傾斜角度を変更し上下に首振りさせる機構と、車台1に対してハンドル部2を左右に首振りさせる機構とを備えている。ハンドル部2の上下首振り機構を構成する角度調節板30は、嵌合凹溝33を有し、ハンドル部2の下部に設けられている。嵌合凹溝33は、角度調節板30の板面に円弧状に設けられている。連結ロッド31は、一端が角度調節板30に揺動可能に軸止めされている。嵌合凸片38は、連結ロッド31において、嵌合凹溝33に嵌合可能な位置に取り付けられ、嵌合凹溝33に嵌合された状態で連結ロッド31の揺動を規制し、傾斜角度θを固定する。
(もっと読む)
歩行補助車並びに歩行補助車に用いられるテーブルマット
【課題】切替操作なしで左右のグリップとテーブルマット並びに座盤を使用することのできる歩行補助車をシンプルな構造で提供する。
【解決手段】 車輪3a,3bを備えた車台1と、車台1の上部に取り付けられた板状のテーブルマット5と、車台の中間部位に取付けられた座盤4とを備えた歩行補助車であって、テーブルマット5は、使用者の上肢をあずけるのに充分な平面スペースを有する板状ボディ5aと、板状ボディ5aの左右に一体的に形成された一対のグリップ部5bと、グリップ部5bに軸方向に沿って形成された取付孔5cとを備え、この取付孔5cに車台1の取付軸部1cを挿嵌することによってテーブルマット5が車台1に取り付けられ、板状ボディ5aの前端部5dが座盤使用者の背中を受ける背もたれ部として形成される構成とした。
(もっと読む)
操作力伝達機構を備える伸縮可能なフレーム並びにそれを利用したキャリーカート及び歩行補助器
【課題】ワンタッチ操作によって伸縮機構の解除と内部の操作力伝達機構の連結解除並びに伸縮機構の固定と操作力伝達機構の連結とが同時に完了することを可能とする。
【解決手段】2本のパイプ3A,3Bを入れ子状に嵌合させ、内側のパイプ3Aを引き出すことにより伸縮可能とし、一端に配置される駆動部と他端に配置される被駆動部材とを繋いで駆動部と被駆動部とを連係動作可能にする操作力伝達機構とを備える伸縮可能なフレームにおいて、外側のパイプ3Bと内側のパイプ3Aとを連結する位置決めピン33の先端33bで第2の伝達部材32が連結された連結レバー36を第2のばね部材38に抗して第1の伝達部材31側へ付勢して、第1の伝達部材31の凹部31bと連結レバー36の凸部36cと嵌合させるようにしている。
(もっと読む)
歩行補助装置
【課題】把持部を有する手押し台車に、リハビリ歩行者の歩幅、速度に合わせて、リハビリ歩行者の膝部を前後方向に引くことにより、膝関節を屈曲させながらリハビリ歩行者の状態に沿った歩行補助装置を提供することを目的とする。
【解決手段】手押し車1に搭載されたバッテリィ31からの電力により回転する可変速度直流モータ3と、該可変速度直流モータ3回転数を減速させる変速装置4と、該変速装置4に連結して手押し車2の幅方向に延在した軸部の両端部に互いに略180°異なる方向に屈曲した左右一対のクランクアーム45と、リハビリ歩行者の膝に装着された膝用バンド部材6とを連結すると共に、緩衝部材72を介装した連結部材7と、膝用バンド部材6とを備えたことを特徴とする
(もっと読む)
31 - 40 / 197
[ Back to top ]