
国際特許分類[A61H3/04]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 物理的な治療装置,例.人体のつぼの位置を検出または刺激する装置;人工呼吸;マッサージ;特別な治療または人体の特定の部分のための入浴装置 (8,757) | 病人または身体障害者歩行補助器具 (875) | 病人または身体障害者のための車輪のついた歩行補助具 (197)
国際特許分類[A61H3/04]に分類される特許
71 - 80 / 197
介護用起立支援移動台車
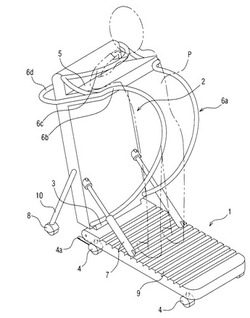
【課題】被介護者を起立姿勢で乗せたままの状態で、一人の介助者によるトイレや浴槽の場所までの移動を転倒させることなく安全に行えるようにする。
【解決手段】被介護者Pが起立して移動可能とするようキャスター4を配してなる台車本体1と、該台車本体1の前部に支承部3を介して前後方向に傾倒自在となって配置し、且つ介助者が操作する介助者用操作ハンドル6d、被介護者Pが手で掴めるようにした被介護者用手摺6cそれぞれを設けた起伏体2とを備える。起伏体2は、被介護者Pが被介護者用手摺6cを掴んで前屈みとなることで前向き側への所定の傾倒位置で当該被介護者Pを保持可能にする。起伏体2には、被介護者P用の肘載せ台5および被介護者転倒防止用ガード6aを設ける。また、起伏体2の前後方向の所定の傾倒角度位置での保持を可能にし、収縮あるいは伸張状態を維持する油圧駆動の伸縮アーム7を設ける。
(もっと読む)
歩行器具

【課題】足腰の弱い使用者が自力で立ち上がるときの動作を補助することができ、他人の介助を借りずに長期間快適に使用し続けることができる歩行器具を提供する。
【解決手段】前輪36が取り付けられた一対のフレーム体により構成された前輪側フレーム体62と、後輪22が取り付けられた一対のフレーム体により構成された後輪側フレーム体64から成る。後輪側フレーム体64と前輪側フレーム体62は、左右一対に設けられた軸部材46を回転軸として揺動し、前後方向に折り畳み可能に互いに軸着されている。後輪側フレーム体64には、左右一対のグリップ26,30が、高さの異なる位置であって後輪22側に突出して複数対備える。前輪側フレーム体62には、後輪側フレーム体64に設けられたグリップ26,30と同じ突出方向で相対的に低い位置に、左右一対のグリップ38を備える。
(もっと読む)
移動式歩行訓練機及び歩行補助機
【課題】訓練者や歩行者がバランスを崩したときの非常制御を確実に行って転倒を未然に防ぐことで、訓練者や歩行者と共に自走移動する歩行機でありながら安全性の高い移動式歩行訓練機及び歩行補助機を提供する。
【解決手段】本体1内に自走装置を備え、訓練者の上肢部を支えた状態で訓練者を本体1内の移動式訓練空間Sに立たせて自走することで歩行訓練を行うものであって、移動式訓練空間S内の訓練者の腰部下方に設けられ、倒れた訓練者を座支することのできる座部2と、倒れた訓練者による座部2の変位/傾斜/被加圧を検知して検知信号を発する検知部3と、検知部3の検知信号に応じて自動走行の停止或いは自動走行内容の変更を行う走行制御部とを具備する。
(もっと読む)
歩行補助装置
【課題】歩行者が煩わしい操作を行うことなく着座することができる歩行補助装置を提供する。
【解決手段】歩行補助装置1では、通常歩行モードから着座モードへの移行が指示されると、荷室ユニット6の荷室本体14が水平を維持した状態で、荷室本体14の底面に設けられた各接地脚15が地面に接地するように、ホイールベース調整モータによって各サブフレーム4a,4bを各メインフレーム3a,3bに対して開くように回動させて、前側車輪7a及び後側車輪7cの中心間距離(ホイールベース)を大きくする。
(もっと読む)
歩行器
【課題】 立ち上がりや着座の補助を可能として、容易に歩行の姿勢に移ることを支援すると共に、安全に歩行訓練を行うことがてきる歩行器を提供すること。、
【解決手段】歩行者の体を支えることにより、歩行を補助する歩行器において、歩行器の器体を平行四辺形のリンク構造として、ハンドルフレーム4が上下及び前後に平行移動できる構成として、歩行者の立ち上がりや着座を容易にしてリハビリ機会を広げると共に、歩行中の歩行者の体を保持する保持ベルト14を備えて安全な歩行を確保する。
(もっと読む)
自立生活運動支援用車椅子
【課題】要介護者の下肢の運動機能維持回復支援を具備した車椅子を提供する。
【解決手段】車椅子の座席前部に利用者が立位となって立ち、座席を利用した各種の運動や体操が立体位を支持し転倒を防ぐために構成した座席上部の上枠部によって守られ、枠内で安全に運動の行える構造とした。上枠部は座席左右の主フレームによって支持した支柱フレームにより支持される構造とする。利用者は前側方の支柱や上枠の一部を掴み無理する事なく懸垂動作で立ち上がり座席前の床面において上枠の一部を手摺として使い歩行の訓練や下肢を使った生活移動や全身のリハビリや筋トレを介助者に頼る事なく行える。
(もっと読む)
歩行補助装置
【課題】安定状態を維持することが可能な歩行補助装置を提供する。
【解決手段】歩行補助装置10は、水平に延設されるハンドル12と、ハンドルの両端から斜め下方に向けて延びるメインフレーム14L,14Rと、メインフレームの途中部分から延びるサブフレーム16L,16Rと、メインフレームに対してサブフレームを回動自在に連結するジョイント18L,18Rと、メインフレームおよびサブフレームの連結角度を制御するアクチュエータと、メインフレームに設けられた前側車輪20FL,20FRと、サブフレームに設けられた後側車輪20RL,20RRと、ジョイントから吊り下げられた荷物積載部22と、荷物積載部に積載された荷重検出手段と、荷重検出手段により検出された重量の増加に応じてメインフレームおよびサブフレームの連結角度を大きくするようにアクチュエータを制御するコントローラと、を備える。
(もっと読む)
歩行補助装置
【課題】収納性の向上を図ることができる電動式の歩行補助装置を提供する。
【解決手段】歩行補助装置1は、ハンドル2から下方に向けて延びるメインフレーム3a,3bと、メインフレーム3a,3bから下方後側に向けて延びるサブフレーム4a,4bと、メインフレーム3a,3bに対してサブフレーム4a,4bを回動自在に連結するジョイント部5a,5bと、メインフレーム3a,3b及びサブフレーム4a,4bの下端にそれぞれ設けられた左右の車輪7a〜7dと、各車輪7a〜7dをそれぞれ独立に回転駆動させるインホイールモータ8a〜8dとから構成されている。メインフレーム3a,3bにおけるジョイント部5a,5bから前側車輪7a,7bの中心までの距離L1は、サブフレーム4a,4bにおけるジョイント部5a,5bから後側車輪7c,7dの中心までの距離L2よりも短い構成となっている。
(もっと読む)
歩行補助装置
【課題】 簡単な操作で直進・旋回動作を行うことができる歩行補助装置を提供する。
【解決手段】 歩行補助装置1は、ハンドル部を有するフレーム体の左右両側に設けられた4つの車輪をそれぞれ回転駆動させるインホイールモータ4A〜4Dと、歩行者がハンドル部を握っているかどうかを検出するタッチセンサ10と、コントローラ11とを備えている。コントローラ11は、インホイールモータ4A〜4Dに生じる逆起電力を検出し、この逆起電力に基づいて各車輪の車輪速指令値を求め、その車輪速指令値に応じて各車輪を駆動させるようにインホイールモータ4A〜4Dを制御する。また、コントローラ11は、タッチセンサ10の検出信号に基づいて歩行者がハンドル部を握っていないと判断すると、各車輪を制動させるようにインホイールモータ4A〜4Dを制御する。
(もっと読む)
歩行補助装置
【課題】左右方向の傾斜した路面に好適に対処することが可能な歩行補助装置を提供する。
【解決手段】歩行補助装置10は、左右一対のジョイントの間に横架された支持部材であって、左右一対のジョイントにより左右方向軸回りに回動自在に支持されると共に、前後方向軸回りに回動自在に構成された少なくとも一つの回動支持部を有する支持部材26と、支持部材の回動支持部から吊り下げられた、前側車輪および後側車輪の駆動制御用の電装部品22と、支持部材に対する電装部品の前後方向軸回りの吊下げ角を検出する吊下げ角センサ34と、吊下げ角センサにより検出された電装部品の前後方向軸回りの吊下げ角に基づいて、左側メインフレームおよび左側サブフレームの連結角度および右側メインフレームおよび右側サブフレームの連結角度をそれぞれ独立して制御するコントローラ12dと、を備える。
(もっと読む)
71 - 80 / 197
[ Back to top ]