
国際特許分類[A63H11/02]の内容
生活必需品 (1,310,238) | スポーツ;ゲーム;娯楽 (86,983) | 玩具,例.こま,人形,フープ,積木 (4,067) | 自動式形象玩具 (332) | 偏心のおもりを回転することによってつくられる振動で動くもの (12)
国際特許分類[A63H11/02]に分類される特許
1 - 10 / 12
移動装置

【課題】振動モータを用いて簡易かつ正確に移動体を回転または移動させる。
【解決手段】移動装置1は、回転軸5に偏って取り付けられる錘部材6を有する振動モータ2と、振動モータ2が取り付けられ、振動モータ2と共に移動可能な移動体3と、移動体3が錘部材6の慣性力により所定方向に移動するように、錘部材6が所定の回転位置のときに振動モータ2を減速させるか停止させる回転制御部4と、を備える。振動モータ2の錘6が所定位置まで回転したときに、振動モータ2の回転を減速または停止させると、錘6に慣性力が働くことに着目し、この慣性力を利用して移動装置1を所望の方向に移動させるため、振動モータ2が1個だけの場合でも、移動装置1を左右の方向に移動させることができる。
(もっと読む)
進行作動玩具

【課題】簡単な構造でありながら、玩具ボディを載置面に沿う方向に安定姿勢で進行させることのできる進行作動玩具を提供する。
【解決手段】玩具ボディ10は、下部ボディ10Bと上部ボディ10Aを備えた構成とし、下部ボディ10Bに、載置面2に設置される複数の脚部11A,11Bを設ける。下部ボディ10Bには駆動体であるゼンマイばね17を設け、ゼンマイばね17による回転部に上部ボディ10Aを連結する。上部ボディ10Aの重心Gを軸芯に対して偏心させ、重心Gを水平方向に旋回させる。1つの脚部11Bの載置面2との接触抵抗を、残余の2つの脚部11Aの載置面2との接触抵抗よりも充分に小さくする。上部ボディ10Aの重心Gが水平方向に旋回すると、接触抵抗の小さい脚部11Bのある方向にずれ動くようになる。
(もっと読む)
揺動装置
【課題】
簡単な構成により複雑な揺動を発生可能な揺動装置を提供する。
【構成】
モータ104の回転軸104aに直結されたフライホイール103をベース110に搭載してなり、前記モータ104の回転により前記回転軸104aと同軸で回転する出力軸105が形成された回転体102を、ケース120に形成された案内軌道150を構成する摺接面に対して前記出力軸105を摺接可能に、前記ケース120の内部に支承する。
(もっと読む)
転動ロボット
【課題】構造の複雑化を抑制しつつ、常に全ての方向に転動させることができる転動ロボットを提供する。
【解決手段】立方体状の筐体2と、筐体2内に設けられたメインモータ10と、メインモータ10の回転軸の一端に固定されたフライホイール12と、回転軸に対して鋭角に交差する方向に沿って延在し、かつ筐体2に対してメインモータ10を旋回可能に支持する支持軸14,15と、メインモータ10を支持軸14,15周りに旋回駆動させるサブモータ13とを備え、支持軸14,15は、互いに隣接する任意の二面に投影させた形状がこの二面に平行な直線に対して傾斜した状態となるように設けられている。
(もっと読む)
転動ロボット
【課題】軽量かつ剛性が高い本体ケースを備える転動ロボットを提供するものである。
【解決手段】転動ロボット1は、回転軸を有するモータと、回転軸に取り付られた回転部材と、モータおよび回転部材を内包する略立方形状の本体ケースとを備える。本体ケース2は、金属より環状に形成され、互いに一体的に連結される複数のフレーム(52から57)により形成されるケースフレーム51と、樹脂より板状に形成され、各フレーム(52から57)間を覆う複数のプレート部材(62,63,64)から形成されるケースカバーと、を備える。
(もっと読む)
振動モータ及び2列の脚部を有する乗物、特に振動モータを有する玩具ロボット
乗物、特に玩具ロボット100は、複数の脚部104と、振動駆動部202、210と、を有する。乗物の本体部122と乗物の脚部との間には、空間、特にV字状の凹所があり、脚部は、正立回転中に内方に曲がる及び/または、脚部の列は、振動駆動部の回転軸の側部に位置する。 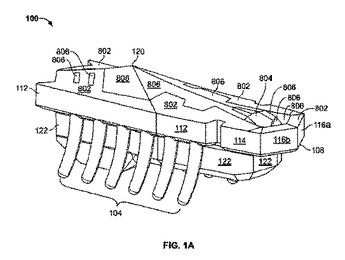 (もっと読む)
(もっと読む)
振動モータを有する乗物、特に自己正立する玩具ロボット
乗物、特に玩具ロボット100は、複数の脚部104と、振動駆動部202、210と、を有する。乗物は、振動モータの回転トルク205の効果によって回転して自身で正立するように構成されている。これは、例えば、本体部のまたは乗物の重心502を振動モータ202、210の回転軸に近接してまたは回転軸上に位置付けるように構成することによって達成される。 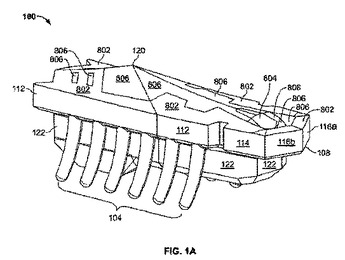 (もっと読む)
(もっと読む)
前方偏心ウェイトを有する乗物、特に振動モータを有する玩具ロボット
乗物、特に玩具ロボット100は、複数の脚部104と、振動駆動部202、210と、を有する。振動駆動部は、モータ210と、偏心ウェイト202と、を有し、偏心ウェイトは、前脚部104aの前方に配置されている。 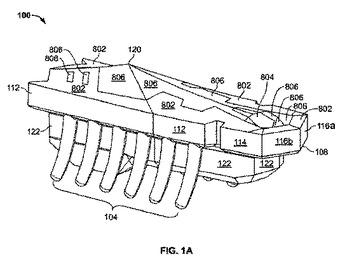 (もっと読む)
(もっと読む)
モーターロボット
【課題】 動作の意外性を有するモーターロボットを提供する。
【解決手段】 前輪12aとウエイト部30aとが第1の回転体になると共に、前輪12bとウエイト部30bとが第2の回転体となり、軸体27の回転によって、ウエイト部30a、30bに部分的に遠心力が生じる。すると、この遠心力によって前輪12a、12bと接続されている軸体27の軸方向に対して直交する方向に歪みが生じる。歪みが生じた軸体27が回転動作を続けると軸体27の歪みが振動発生源となり、軸体27を支持する車体3が振動することで、前バンパー4と後バンパー5とに振動が伝達される。これによって、モーターロボット1は脚体となる前バンパー4と後バンパー5とを介して、種々の方向へ移動することになる。
(もっと読む)
走行駆動装置
【課題】振動を利用して滑らかに移動させることが可能な走行駆動装置を提供する。
【解決手段】上下に延在し下端部が自由端の板状部材からなる一対の足部1aを備える。その各足部1aに対し振動を付与する一対の振動モータ2を備え、電池から電力が供給される。各足部1aは、鉛直方向Vに対し板厚方向へ傾斜している。
(もっと読む)
1 - 10 / 12
[ Back to top ]