
国際特許分類[A63H11/18]の内容
生活必需品 (1,310,238) | スポーツ;ゲーム;娯楽 (86,983) | 玩具,例.こま,人形,フープ,積木 (4,067) | 自動式形象玩具 (332) | 実際的な歩行運動をする形象玩具 (125)
国際特許分類[A63H11/18]の下位に属する分類
数対の足を有するもの,例.馬 (18)
国際特許分類[A63H11/18]に分類される特許
1 - 10 / 107
ロボット歩行装置
【課題】構造が簡便で製造費が安価で且つ堅牢な、競走競技に適した歩行ロボットを提供する。
【解決手段】ロボット走行装置は、胴体と、1対の脚部と、前記脚部の下端部に装着された足裏部材と、前記1対の脚部を交互に走行させる駆動機構を有する。脚部は、ロボットの胴体の矢状面に対して垂直に配置された枢動軸回りに枢動可能に構成され、駆動機構は、遠隔操縦によって回転可能なモータと、該モータの軸に装着された回動板と、該回動板の両側に装着された1対の揺動軸と、を有する。
(もっと読む)
二足歩行ロボット

【課題】簡単な構成で人間に近いスムーズな歩行、また外部からの衝撃にも倒れづらい二足歩行ロボットを実現する。
【解決手段】永久磁石4、4A、4B、4Cと鉄板9、9A、9B、9Cをそれぞれ吸着させる。永久磁石4、4Aを取り付けた板5をモーター3によって90度回転させ、永久磁石4は鉄板9からアルミ板8A、永久磁石4Aは鉄板9Aからアルミ板8Aの上にそれぞれスライドさせ、永久磁石4と鉄板9、永久磁石4Aと鉄板9Aによる吸着をとく。その状態からモーター3B、3Cを右足1の底面が床面10と平行に持ち上がるようそれぞれ30度回転させると重心移動を要さずに右足2を持ち上げる事が出来る。右足1を持ち上げた後、モーター3B、3Eを足1が床面10と平行に接するようにそれぞれ30度回転させると前進することができる。
(もっと読む)
二足歩行ロボットの股関節構造
【課題】傾斜角度のある斜面での直進歩行を実現し、軽量化および製作コストを削減したロボットを提供することを目的とする。
【解決手段】胴体部及び該胴体部に連結される左右の脚部を有する二足歩行ロボットにおいて、左脚部に連結する左サイドギア、該左サイドギアに噛合される左ピニオンギアとを備える左モジュールと、右脚部に連結する右サイドギア、該右サイドギアに噛合される右ピニオンギアとを備える右モジュールと、前記2つのモジュールを平行リンク又は同径のプーリで結合させ、胴体部に対して常に同位相同角度で傾斜するように拘束し、さらに前記各ピニオンギアを同径のプーリで同期させることにより前後の脚部運動が逆位相同角度となるように拘束することを特徴とする。
(もっと読む)
二脚型移動装置
【課題】人間が暮らす住環境に存在する障害物をスムースに跨ぎ越すことのできる二脚型移動装置を提供する。
【解決手段】角度自在に屈折可能な膝関節を有する第1および第2の脚と、第1および第2の脚の根元の関節(腿関節)をそれぞれ回動自在に支持する臀部10と、前記膝関節の屈折角度および前記腿関節の回転角度をそれぞれ制御して、進行方向の床上に設けられた凸状の障害物を跨ぎ越す跨ぎ越し制御手段と、を備える。跨ぎ越し制御手段は、第2の脚を障害物の後方側に接地させた状態で第1の脚を前記障害物の上方へ振り出して該障害物を跨ぐ場合に、第2の脚の膝関節を後方へ突出させた姿勢(逆膝の姿勢)に制御する。好ましくは、第1および第2の脚の先端に設けられた第1および第2の車輪機構による走行を併用することにより、等速で走行しながらのスムースな跨ぎ越しを行う。
(もっと読む)
脚式移動ロボット
【課題】駆動制御性の良好な膝関節角を増加させることが可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、上腿リンク32と下腿リンク34を連結する膝関節16とを有する脚体2を備える。膝関節16は、一端が下腿リンク34の軸40に対して回転自在に連結され、他端が上腿リンク32の軸42に回転自在に連結される連結ロッド44と、下腿リンク34の軸60と上腿リンク32の軸56との間の距離を、電動モータ40による駆動力により変化させる距離変動機構50とを備える。膝関節16の屈曲角が0度のとき、軸40と軸42との間の距離と軸60と軸56との間の距離との和が、軸40と軸56との間の距離よりも小さい。
(もっと読む)
脚式移動ロボット
【課題】足首部のコンパクト化が可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、下腿リンク34に設けられ、ピッチの方向に揺動可能な揺動部材52と、下端54aが揺動部材52の前端52bに連結された前側ロッド54と、上端56aが揺動部材52の後端52cに連結され、下端56bが足首関節の揺動軸線より後方にて足平22に連結された後側ロッド56と、前側ロッド54を駆動するアクチュエータ58と備える足首関節駆動機構50を有する。
(もっと読む)
脚式移動ロボット
【課題】遊脚の着地可能範囲を広くすることが可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、上体4、及び、上体4と上腿リンク30R(L),32R(L)を連結する股関節と、上腿リンク30R(L),32R(L)と下腿リンク34R(L)を連結する膝関節と、下腿リンク34R(L)と足平22R(L)を連結する足首関節とを有し、左右対称の脚体2R(L)を備え、各脚体2R(L)を駆動して移動する。股関節はヨー方向に回転する股関節ヨー軸部10R(L)を有し、ロボット1が直進するとき、支持脚となる脚体2R(L)の上腿リンク30R(L),32R(L)が上体4に対して前方斜め外側を向くように、股関節ヨー軸部10R(L)において上体4に対する第1上腿リンク30R(L)のヨー方向の回転角が設定される。
(もっと読む)
脚式移動ロボット
【課題】遊脚の着地可能範囲を広くすることが可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、上体4、及び、上体4と上腿リンク30R(L),32R(L)を連結する股関節と、上腿リンク30R(L),32R(L)と下腿リンク34R(L)を連結する膝関節と、下腿リンク34R(L)と足平22R(L)を連結する足首関節とを有し、左右対称の脚体2R(L)を備え、各脚体2R(L)を駆動して移動する。 足首関節はピッチ方向に回転するピッチ回転軸部18R(L)を有し、ピッチ回転軸部ピッチ回転軸部18R(L)の軸線が、左右方向内側が外側より低くなるよう傾斜する。
(もっと読む)
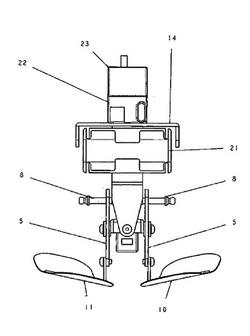
重心移動装置を有する2足歩行ロボット及び重心移動方法
【課題】2足歩行ロボットにおいて、ヒトの2足歩行運動の様に、より自然な歩行姿勢を実現するための構造と重心移動方法を提供する。
【解決手段】腰部4と両脚から成る下肢と、腰部を軸に傾斜可能な腹部3と、頭部6及び可動可能な両腕が接続され、腹部を軸に回転可能な構造の胸部から成る上体から構成され、胸部筐体内に独立して上下左右に可動可能なバランサー42と称する駆動用バッテリー及びスタビライザー43と称する重心移動用補助錘を搭載し、各可動部はアクチュエーター8により可動であり、頭部に擁する3軸加速度センサー22により腰部を絶対水平に保ち、前後の重心移動は上体の前傾動作もしくは後傾動作、もしくはスタビライザーの胸部2筐体内での位置移動もしくは両脚の足関節部動作により行い、また左右の重心移動は腹部を軸とする胸部の回転動作と、バランサーとスタビライザーの複合動作により行う2足歩行ロボット。
(もっと読む)
二脚式歩行装置
【課題】大きな歩幅と安定性とを両立させる。
【解決手段】少なくとも3点の接地点を有する右足裏1および左足裏3と、右足裏1から上方側に向かって延びるとともに右足裏1に対して回転接続される右脚2と、左足裏3から上方側に向かって延びるとともに左足裏3に対して回転接続される左脚4と、右脚2のうち右足裏1の反対側部位とを備え、右足裏1は、ジグザグ平面ローラー11の二等辺三角形のうち1つの二等辺三角形の底辺側部位上に位置し、左足裏3は、ジグザグ平面ローラー11の二等辺三角形のうち右足裏1に隣り合う二等辺三角形の底辺側部位上に位置し、ジグザグ平面ローラー11が転がる際に二等辺三角形が順番に接地して進行するように、右足裏1および左足裏3が順番に接地し歩行を実行する。
(もっと読む)
1 - 10 / 107
[ Back to top ]