
国際特許分類[A63H3/36]の内容
生活必需品 (1,310,238) | スポーツ;ゲーム;娯楽 (86,983) | 玩具,例.こま,人形,フープ,積木 (4,067) | 人形 (737) | 細部;付属品 (329)
国際特許分類[A63H3/36]の下位に属する分類
人形の眼 (48)
人形の髪またはかつら;まつ毛;まゆ毛 (23)
手足の連結部 (58)
人形への部品のとりつけ,例.自動の眼 (16)
人形または動物玩具のための台わく,台,または車輪 (15)
人形の家,家具,またはその他の装備品;人形の衣類 (28)
国際特許分類[A63H3/36]に分類される特許
21 - 30 / 141
制御情報生成装置および形状制御装置
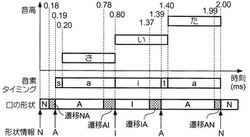
【課題】音節の発音内容を規定した発音情報に基づいて、口を模した部分を持つ装置における口の形状を変化させる制御を行いながらも、口の形状の変化を自然なものにすること。
【解決手段】本発明の実施形態に係る形状制御システムにおいては、発音装置および口を模した部分を有する形状変化装置を、形状制御装置を用いて制御する。形状制御装置は、発音情報に基づいて発音装置を制御するとともに、発音情報から制御情報を生成して、この制御情報を用いて形状変化装置を制御する。形状制御装置は、発音情報から制御情報を生成するときに、口の形状が変わるときにおける変化前から変化後までの遷移時間を示す遷移情報を、予め決められたアルゴリズムに従って決定する。そして、形状制御装置は、口の形状が変化させるときには、遷移時間で徐々にその形状が変化するように形状変化装置を制御する。
(もっと読む)
外付け式人間型手のためのアクチュエータおよび電子機器のパッケージング

【課題】外付け式人間型手のためのアクチュエータおよび電子機器のパッケージングを提供すること。
【解決手段】人間型ロボット用の下腕アセンブリは、第1の側および第2の側を有する腕サポートと、腕サポートの第1の側に取り付けられる複数の手首アクチュエータと、腕サポートの第2の側に取り付けられる複数の指アクチュエータと、腕サポートの第1の側にやはり配置される複数の電子機器とを備える。
(もっと読む)
電気機器漏電磁力利用した磁石玩具
【課題】 玩具に意外性を持たせて、扱う人に好奇心を起こさせるために、外部からの力無しで運動しているように見える仕掛けをするのが一つの方法である。本発明は課題を解決する方法として、家庭用交流電源を使用する電気機器の変圧部から外部に漏洩する磁力を利用して、ユーモラスな動きを行う電気機器漏電磁力利用した磁石玩具を提供する。
【解決手段】 玩具本体の底部に、磁極を結ぶ方向が、電器機器変圧部の面と平行になるように磁石を固定し、玩具本体の底部に、電気機器変圧部から受けた磁力を回転、走行運動に効率よく変換するための3個以上の接地点を持つ運動変換足、又は連続して連なった運動変換足を貼付することを特徴とする電気機器漏電磁力利用した磁石玩具。
(もっと読む)
人形玩具の2段階関節部材及び人形玩具
【目的】製造時等における誤差や遊戯時等における磨耗による影響が著しく少なく、人形玩具としての可動部分として円滑な回動が可能であると共に任意の位置での回動固定が可能である人形玩具の2段階関節部材及び人形玩具を提供する。
【構成】人形玩具の関節部に配設されて2段階関節となる関節基体部の第1・第2回動部に軸回動可能に支持されると共に、人形玩具の構造体の一方・他方に接続する接続部を有する第1・第2連結部材と、を有し、
関節基体部には第1・第2間欠回動用被係止部・第2間欠回動用被係止部が各々設けられ、
第1・第2連結部材に設けられている第1・第2間欠回動用係止部の回動軸方向内側近傍部分に第1・第2刳り貫き貫通部が形成されて前記第1・第2間欠回動用係止部が回動半径方向に対して可撓性を発揮する構成の第1・第2クッション作用部、が設けられていることを特徴とする。
(もっと読む)
人体模型及び人体模型の腕部構造
【課題】より実際の人間に近いポーズを再現可能であり、且つ、外形のフォルムもより実際の人間に近づけることができる人体模型を提供する。
【解決手段】人体模型の胴体を、胸が形成されている胸部7と、腰が形成されている腰部11とに分割し、胸部7と腰部11とを連結パイプで連結し、胸部7と連結パイプ、腰部11と連結パイプとは各々回動可能となっている人体模型であり、胸部7と腰部11との間に、複数のシェル部材31〜34が相対移動可能に連結されて形成された腹部8を備え、この腹部8によって連結パイプの前側を覆うようにした。
(もっと読む)
可変の表情を有する一体型のおもちゃの人形
おもちゃの人形を作成する方法として、1つ以上のおもちゃの人形がここで説明される。おもちゃの人形は可変性の表情の画像を有するのが好ましい。おもちゃの人形は、ステッカー取付部を有する頭部を含む、射出成形による一体成形の身体部を有する。ステッカー取付面は、身体部の凹部として設けられる。ステッカーは、ステッカー取付面に配置される。ステッカーはレンチキュラー画像を有するステッカーとして設けられ、ステッカーは、少なくとも1つの第1の画像と、少なくとも1つの第2の画像とをレンチキュラー画像の一部として有する画像を含む。ステッカーは第1の位置(または第1の向き若しくは第1の角度)で保持されると第1の画像を表示し、第2の位置(または第2の向き若しくは第2の角度)で保持されると第2の画像を表示する。 (もっと読む)
人間のような指を有するロボットハンド
【課題】人間の手の形状因子及びジェスチャーを良くシミュレートするフィンガーアッセンブリを備えるロボットハンドを提供する。
【解決手段】各フィンガーアッセンブリ112,114,116,118,120に関して、ロボットハンドは4本のテンション要素に張力を選択的に加えるように操作可能なフィンガー駆動アッセンブリ160を備えている。各フィンガーアッセンブリは駆動アッセンブリによってテンション要素の選択的な引っ張り/移動によって移動する一連のリンク部材を含んでいる。リンクは3自由度を有するように互いに旋回可能に連結されている。フィンガーアッセンブリは、フィンガーアッセンブリを通してテンション要素を支持しかつ案内する一連のプーリーを備える。テンション要素は、プーリーの周りを部分的に延びており、それによって、フィンガーアッセンブリはテンション要素の非螺旋状の巻回でn+1駆動を実行する。
(もっと読む)
人形駆動装置
【課題】 擦弦型の人形駆動装置において擦弦動作を上腕及び前腕の両方の動作で行い、押弦動作も前腕を動作させて人間により近い形で演奏動作をさせる。
【解決手段】本発明の擦弦動作は前腕9の一端にワイヤー8を自在に取り付け、ワイヤー8は、円弧上のチューブ26を通って足裏の駆動部に連結されている。
一方上腕10の動きは、駆動レバー16に連結されたワイヤー18は足裏を通って駆動部に連結されている。
ワイヤー8、18を動作させると、バイオリンの弓上下に動き1弦から4弦までの擦弦動作をする。
押弦動作はワイヤー21は肩20の中心を通って、90度折り曲げられて前腕24の上部の穴25に自在に連結されている。
ワイヤー21はワイヤー18と止め金具19で結合されておりワイヤー18の動きと同じく動き、垂直の動きから水平の動きになって、上腕24を左右に動かせる。
(もっと読む)
人形玩具の可動連結部材及び人形玩具
【目的】人形玩具に様々な動作や姿勢をさせる際に関節部に無理な力や負荷がかかった場合であっても関節部の脱落が著しく抑制する。
【構成】人形玩具の肘・膝の如き関節部に配設されることで腕や脚の如き各構造体同士を動作可能に連結する可動連結部材において、
腕・脚の如き構造体の内の一方に接続すると共に関節の回動用軸受孔を有する第一連結部材と、他方の構造体に接続すると共に前記第1連結部材を回動可能に軸支する回動軸を有する第2連結部材とを有して成り、
前記第2連結部材が第2−1連結部材及び第2−2連結部材の2つの部材から成り、
該第2−1連結部材と第2−2連結部材の2つの部材が、前記第1連結部材の両側から該第1連結部材を挟み込んだ状態で軸支する構成であると共に、該第2−1連結部材及び第2−2連結部材の各々に他方の構造体に接続する接続部が設けられた構成であること、
を特徴とする。
(もっと読む)
顔部と後頭部が着脱可能に接合する人形頭部及び該人形頭部を有する人形
【課題】過度の負荷なく顔部及び後頭部を着脱可能な人形頭部を提供すること。
【解決手段】顔部3と後頭部4が着脱可能に接合する人形頭部1であって、前記顔部3及び後頭部4のいずれか一方の内部に形成された嵌合凸部7と、その他方の内部に形成された嵌合凹部6と、前記顔部3及び後頭部4のいずれか一方の内部に形成され、一端が開口したスリット5と、を有し、前記嵌合凸部7及び嵌合凹部6のいずれか一方は、前記スリット5を挟んだ両側に分割して形成され、前記嵌合凸部7と嵌合凹部6が嵌合することによって、前記顔部3と後頭部4が着脱可能に接合することを特徴とする、人形頭部1を提供する。
(もっと読む)
21 - 30 / 141
[ Back to top ]