
国際特許分類[A63H3/36]の内容
生活必需品 (1,310,238) | スポーツ;ゲーム;娯楽 (86,983) | 玩具,例.こま,人形,フープ,積木 (4,067) | 人形 (737) | 細部;付属品 (329)
国際特許分類[A63H3/36]の下位に属する分類
人形の眼 (48)
人形の髪またはかつら;まつ毛;まゆ毛 (23)
手足の連結部 (58)
人形への部品のとりつけ,例.自動の眼 (16)
人形または動物玩具のための台わく,台,または車輪 (15)
人形の家,家具,またはその他の装備品;人形の衣類 (28)
国際特許分類[A63H3/36]に分類される特許
81 - 90 / 141
人形組立玩具と、人形組立用ジョイント部材と、ジョイント部材を用いた人形の組立方法。
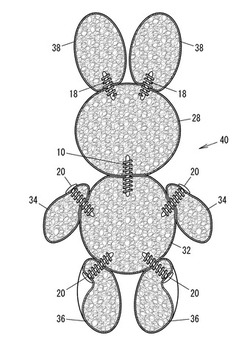
【課題】網地で袋状に形成された複数の形成部材同士をあらゆる位置で結合可能とした人形組立用ジョイント部材であり、このジョイント部材を用いた人形組立玩具と人形の組立方法を提供する。
【解決手段】複数の形成部材とジョイント部材からなる組立玩具であって、前記形成部材は、網地で袋状に形成され、その内部に中綿を詰めて柔軟性を有し、前記ジョイント部材は、少なくとも一方の端部が先細りする棒形状で、その側面には軸方向に沿って螺旋状の螺旋部14を備え、前記形成部材同士がジョイント部材により各々結合されている。
(もっと読む)
縫いぐるみ

【課題】手触りの良い柔軟性のある縫いぐるみであって、使用者が、引紐を把持して歩行すると、縫いぐるみが、恰も歩行しているかのような動作を行わせる趣向の高い縫いぐるみを提供する。
【解決手段】4つ脚を有する動物を模した形に形成され、その内部に中綿を詰めた柔軟性を有する縫いぐるみであって、縫いぐるみは、頭部24と、胴体部22と、左右の前脚部12と、左右の後脚部16とを有し、胴体部の内部に背骨部材32を有し、背骨部材の前端に前脚部材取付部40を備え、背骨部材の後端に後脚部材取付部46を備え、前脚部先端に設けた前脚先端部材52と前脚部材取付部とを接続する前脚部材34として弦巻バネを内蔵し、後脚部先端に備えた後脚先端部材58と後脚部材取付部とを接続する後脚部材36を内蔵し、首部分に引紐30を備えた。
(もっと読む)
可動人形の下半身部
【課題】従来の可動人形の下半身部は、可動範囲を再現するのみで関節の可動による形状の再現がほとんどなされてなかった。
【解決手段】可動範囲を人体と同様にするために関節の基本構造を人体と同様にし、腰部、大腿部、膝下部などを一体的パーツを関節で繋ぐ方法ではなく、腰部、大腿部、膝下部などを関節の動きに合わせて形状変化するように最適の形状で複数パーツに分割する事によって関節可動による形状変化を再現する。
(もっと読む)
人形玩具
【課題】頭部等を摺動自在にし安定した状態で支持される人形玩具を提供する。
【解決手段】胴部及び頭部と腕部並びに脚部を有し、前記胴部は、頭部取付穴と腕取付穴及び脚部取付穴を有して脚部取付穴は、斜め下方前方への中心軸を有し、前記脚部は、接続リングを取り付けるリング取付穴を有すると共にリング取付穴の周囲にリング取付凹部を、このリング取付凹部の周囲に平面状の摺接面を有し、リング取付凹部及び摺接面は脚部に対して傾斜して摺接面の下方周縁から脚部の内股部に連続する段部を有し、前記腕部はその基部にリング取付穴を有し、前記接続リングは内筒部の両端に外周に膨出する内鍔部及び中間鍔部を有し、中間鍔部から内筒部と同軸とされた外筒部及び外筒部から外周に膨出する外鍔部を有し、この接続リングは中間鍔部と外鍔部により腕部や脚部に接着固定され、且つ中間鍔部と内鍔部とにより、胴部へ摺動可能に取り付けられている。
(もっと読む)
ロボットとロボットの制御方法
【課題】 把持する物体の形状等を正確に把握することなく、物体を把持することができるロボットを具現化する。
【解決手段】 物体を把持するロボットであって、少なくとも2本の指を有するハンド部と、各指に少なくとも一つずつ配設されており、各指の所定箇所と把持対象物との接触を検出する接触センサ群と、少なくとも把持対象物の形状を記述する形状情報を入力し、ハンド部が把持対象物を把持したときに接触センサ群が出力する信号群を予測する予測手段と、接触センサ群から出力されている信号群が、予測手段によって予測された信号群に等しくなるように、各指の動作を制御するハンド制御手段とを備える。
(もっと読む)
玩具
【課題】磁力展開式の玩具を転動自在にすることにより、玩具の商品価値を格段に向上させ、遊戯者に新鮮な驚きや知的興奮を与える。
【解決手段】外部構造体と、外部構造体の内部に収納される内部構造体と、を備える玩具1であって、外部構造体は、外部係止部5c、7cと、外部構造体を転動自在な第1の形状から第2の形状へと変形させるスプリング30〜32と、を有し、内部構造体は、磁石11と、磁石11とともに移動する内部係止部10cと、内部係止部10cを特定の方向に付勢するスプリング12と、を有する。磁力が作用しない場合に内部係止部10cと外部係止部5c、7cとの係止状態が実現されて外部構造体の第1の形状が維持される一方、磁力が作用した場合に磁石11及び内部係止部10cが移動し内部係止部10cと外部係止部5c、7cとの係止状態が解除されて外部構造体が第2の形状へと変形する。
(もっと読む)
爪進退式玩具およびこの使用方法
【課題】 操作部材を操作することで、爪を出し入れできる爪進退式玩具とその使用方法の提供。
【解決手段】 回動操作される操作部材6を有する基部材2と、基部材に対して関節組立体10を介して軸支され、初期位置から回動位置に回動され、かつ操作部の押圧解除により回動位置から初期位置に回動されるように回動付勢される手組立体20と、手組立体の内部に位置する待機位置と、複数の爪部12aが手組立体の先端から突出する突出位置との間で移動され、かつ待機位置に移動付勢される爪部材12と、手組立体の回動動作に連動して爪部材を突出位置に移動させるための連動機構を備える。
(もっと読む)
首部関節機構及びそれを具備するロボット
【課題】ロボットの首部関節機構において、ピッチ方向の回転自由度を大きくすることができ、且つ、掛かるコストを抑制することのできる首部関節機構及びそれを具備するロボットを提供する。
【解決手段】首部ベース部材3と、前記首部ベース部材3の前端側に設けられピッチ方向に回転可能な第一の回転軸4と、前記第一の回転軸4に接続され該第一の回転軸4の回転によりピッチ方向に回動する第一の連結部材5と、前記第一の連結部材5の先端側に設けられた第二の回転軸S2と、前記第二の回転軸S2に後端側が回動自在に接続され上方にロボット頭部11が設けられる第二の連結部材6と、前記第二の連結部材6の前端側と前記首部ベース部材3の後端側の夫々に回動自在に接続された第三の連結部材9とを備える。
(もっと読む)
人形およびその成型方法
【課題】各関節部を骨部で連結し、多重構造としたことにより、抱いたり握ったりしたときの感触として、肉の下に骨がある人間を握ったり抱いたりしたときの感触が得られるようにする。
【解決手段】首、肩、背骨、股関節、膝、足首、ひじ、手首等の各関節を、複数の部材を回動可能にボルト等によって連結することによって回動および/もしくは軸方向に回転可能に構成し、これら各関節部を骨部で連結した骨組みの胴体を含む主要部を柔軟な軽量合成樹脂材で成型して構成した骨格をシリコンで成型して多重成型構造としたことを特徴とする。
(もっと読む)
弾性を有する末端部を備えるビロード人形並びにその製造方法
【課題】 弾性ゲルをビロード製玩具の織布製外皮に接合する改良された技術の提供。
【解決手段】 本発明は、玩具人形アセンブリとその製造方法を提供する。玩具人形は、外面に現れる外面部を有する本体構造部を備える。人形の外面に現れる外面部は、織布材からなる少なくとも1つの第1セクションと、弾性ゲル材からなる少なくとも1つの第2セクションを備える。第1セクションと第2セクションは少なくとも1つの共通シーム部に沿って接続する。織布材及び弾性ゲル材から玩具人形を形成することにより、対照的な触感的特性を備える外面を備える玩具人形を形成可能となる。これにより玩具人形の遊戯具としての価値が高まることとなる。
(もっと読む)
81 - 90 / 141
[ Back to top ]