
国際特許分類[B05C9/00]の内容
処理操作;運輸 (1,245,546) | 霧化または噴霧一般;液体または他の流動性材料の表面への適用一般 (41,198) | 液体または他の流動性材料を表面に適用する装置一般 (13,956) | グループ1/00から7/00に包含されない手段によって表面に液体もしくは他の流動性材料を適用する装置または設備,または液体もしくは他の流動性材料を適用する手段が重要でないような装置もしくは設備 (1,454)
国際特許分類[B05C9/00]の下位に属する分類
他の手段の使用不使用にかかわらず,グループ1/00から7/00までに包含されない単一の手段によって表面に液体または他の流動性材料を適用するためのもの (5)
被加工物の両側に液体または他の流動性材料を適用するためのもの (27)
2種の異なった液体または他の流動性材料をまたは同一の液体もしくは他の流動性材料を2度,被加工物の同一側に適用するためのもの (52)
液体または他の流動性材料を適用しかつ補助操作を行なうためのもの (1,360)
国際特許分類[B05C9/00]に分類される特許
1 - 10 / 10
塗工用ロッドの製造方法
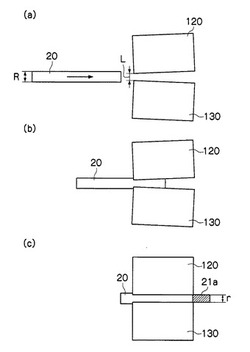
【課題】 ウェブへのスリキズや塗布ムラを解消することができる塗工用ロッドの製造方法を提供する。
【解決手段】
ロッド素材20を準備し、複数の凸条を有する一対の転造ダイス120,130を、ロッド素材20の軸方向に対して転造ダイス120,130の主軸の水平方向の閉じ角が実質的に0.25°以上0.35°以下となるよう配置し、ロッド素材20を軸方向に沿って送り出し、一対の転造ダイス120,130によりロッド素材20を挟圧しながら、主軸を中心に一対の転造ダイス120,130を回転させて塗工用ロッドを製造する。
(もっと読む)
成膜装置およびこれに用いられる樹脂塗布装置

【課題】ダイ金型の加工面および肩部に容易に被膜を形成し、ワーク表面の傷の発生を防止する。
【解決手段】耐摩耗性を有する光硬化型の樹脂Rをダイ金型Kの加工面上に吐出する樹脂吐出部2と、ダイ金型Kの加工面上に吐出された樹脂Rを所要膜厚となるようにならすスクレーパ32を備えたスクレーパ部3と、樹脂Rを硬化させる光を照射する光照射部4とがダイ金型Kの長さ方向にこの順序に一列に組み合わせたものである。樹脂吐出部2は、樹脂Rを貯めるタンク11と、タンク11の吐出口12を開閉する弁13と、吐出口12よりも前方に位置する一対のガイドローラ22とを備え、光照射部3にガイドローラ44を備える。一対のガイドローラ22およびガイドローラ44により、スクレーパ32をダイ金型Kの加工面に対して間隔をおいて支持し、各部をダイ金型K上の長さ方向に沿って移動可能に案内する。
(もっと読む)
液滴選択機構
方法および液滴選択装置は、連続プリンタ用であって、第2の液滴(61)を選択的に噴出し、所定の第1の液滴(62)と衝突させるものである。とくに、本装置は、流出路(5)から噴出した流体ジェット(60)から第1の液滴(6)の連続流を生成するように構成された第1の液滴噴出装置(10)と、第2の液滴を噴出して第1の液滴に衝突させ、第1の液滴を予め決められた印刷軌道から選択的にずらすように構成された第2の液滴噴出装置(100)とを備える。第2の液滴噴出装置は、第2の液滴を選択的に噴出し、所定の第1の液滴と衝突させる制御回路(11)を備える。 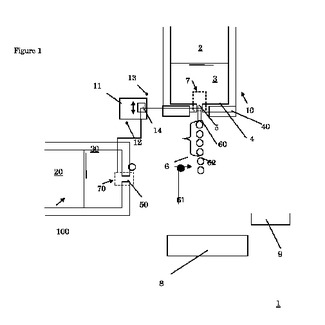 (もっと読む)
(もっと読む)
接着剤および/またはシール材配合物を形成する装置およびプロセス、この方式で生成された接着剤および/またはシール材配合物、ならびに接着剤接合基材
主要成分(A)および少なくとも1つの二次成分(B)を含む接着剤および/またはシール材の流れ(AB)を形成する働きをする本発明の装置(1)が、接着剤および/またはシール材の流れ(AB)を案内する働きをする容器(4)を有し、その中に主要成分および二次成分(A、B)が圧力下で導入でき、容器の出口ノズル(45)から解放できる接着剤および/またはシール材の流れをもたらすために結合できる。本発明は、容器内に突出し、その中に埋め込まれた少なくとも1つの供給チャネル、および少なくとも1つの端部片(3)を有する移送要素(2)を提供し、二次成分Bが巻き取られ、容器を通って流れる主要成分の流れによって完全に包囲され、また、手段が設けられ、それによって端部片と主要成分の流れとの間の回転が、接着剤および/またはシール材の流れの形成の間に実現できるように、移送要素を通って少なくとも1つの二次成分が容器に導入できる。 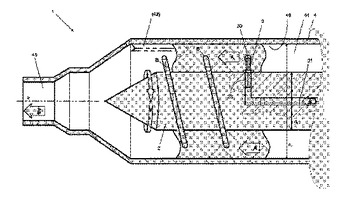 (もっと読む)
(もっと読む)
塗布システム
【課題】塗布領域のみに塗布液が塗布された基板を容易に得る。
【解決手段】塗布システム1は、処理ユニット群2、インデクサ3およびマルチ搬送ロボット4を備え、処理ユニット群2は、有機ELテープユニット26、有機EL塗布ユニット24、および、有機ELベークユニット25を含む。塗布システム1では、処理ユニット群2において、有機ELテープユニット26により基板の非塗布領域に第2マスキングテープ84が貼付され、有機EL塗布ユニット24により非塗布領域を含む基板上の領域に有機EL液が塗布される。そして、有機ELテープユニット26により第2マスキングテープ84が剥離されることにより、塗布領域のみに有機EL液が塗布された基板を容易に得ることができる。その後、有機ELベークユニット25により基板に対する加熱処理が行われることにより、有機EL液が基板上に定着して有機EL層が形成される。
(もっと読む)
塗布ロボット
【課題】 部品に塗布剤を塗布する塗布ロボットを提供する。
【解決手段】 モータにより駆動されて塗布剤の瞬時吐出量を制御する塗布装置をロボット先端に取付ける一方、塗布開始ポイントから塗布終了ポイントまでの移動速度の速度パターンを記憶する記憶部を設け、ロボット先端の移動速度の速度パターンに沿って塗布剤の瞬時吐出量を制御し、塗布面の塗布量を均一にするように構成した塗布ロボットにおいて、
あらかじめ微少な瞬時吐出量が得られるように塗布装置5を作動させ、塗布装置5が塗布開始ポイントに達してロボットを所望位置へ移動させる速度指令値により塗布装置5が駆動される時には、塗布剤がワークに接着するかその寸前となるように構成されている。そのため、ロボット移動開始時に時間遅れなく確実に所定量の塗布剤を塗布することができ、塗布開始ポイントでの塗布面に塗布むらを発生することなく、塗布剤を塗布できる。
(もっと読む)
粉粒物散布体の製造装置
【課題】 粉粒物を傷めることなく、粉粒物をシート上に一定の散布パターンで平面状に展開して散布すること。
【解決手段】 フィーダ11から送給される粉粒物1が平面トラフ12を介して、トラフ12の下方を搬送されているシート101上に散布される粉粒物散布体の製造装置であって、トラフ12とシート101との間に回転円板13を設け、トラフ12から供給される粉粒物1の一部を該円板13の開口部14からシート101上に散布するもの。
(もっと読む)
塗布装置と塗布方法
【課題】
装置の大型化に伴い、複数の塗布ヘッドを設けた門型フレームのフレームが熱伸びにより変形して、塗布位置の精度が低下し、正確な塗布ができないという課題が発生した。
【解決手段】
フレームの一端側を固定として、他端側をフレームの長手方向に移動可能に直動リニアガイド支持する構成として、熱伸びによるフレームに熱応力(フレームの曲がり)が発生しないようすると共に、熱伸びによるヘッド位置のズレを基準器により熱伸び量を求めて補正することで解決できる。
(もっと読む)
部品交換搬送装置およびコーティングライン
【課題】 コーティングラインの部品を簡単かつ効率的に交換することを可能にする。
【解決手段】 部品交換搬送装置は、搬送経路(4)と少なくとも1つのキャリッジ(6)とを含む搬送システムを有し、上記キャリッジは上記搬送経路に沿って移動可能であり、かつ上記キャリッジには、交換されるべき部品を拾い上げるための少なくとも1つの巻上機(7)が設けられ、上記搬送経路は、使用される上記コーティングライン(1)について厳密に特定された搬送経路(4)を規定するガイド部材を含み、上記搬送経路は、上記搬送経路(4)に沿って移動可能でありかつ上記巻上機(7)を有する上記キャリッジ(6)が、交換されるべき上記部品(10)についての正しい持上げ位置および下ろし置き位置に正確に上記巻上機を自動的に案内するように、上記コーティングライン(1)に沿って位置付けられる。
(もっと読む)
流体を操作するためのシステム
流体の本体、特に流動性液滴、を操作するためのシステムは、電極を有し、その電極に調節可能な電圧を印加する、それはエレクトロウエッティング効果に基づいて液滴の変位を制御する。流体の本体と制御電極との間に固定された電圧を有する対向電極を有する。さらに、対向電極及び制御電極は流動性液滴の同じ側に位置するので、流動性液滴は対向電極及び制御電極から離れた場所で自由に接触可能である。従って、流動性液滴は物体のキャリアとしての使用可能であり、ペイロードは自由に接触できる側からの液滴上に位置することができる。 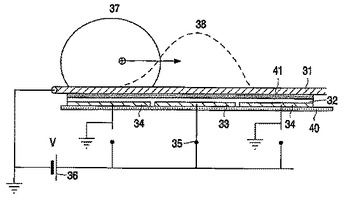 (もっと読む)
(もっと読む)
1 - 10 / 10
[ Back to top ]