
国際特許分類[B23P21/00]の内容
処理操作;運輸 (1,245,546) | 工作機械;他に分類されない金属加工 (71,475) | 金属の他の加工;複合作業;万能工作機械 (3,247) | ユニットを構成するべく種々の多数の部品を組立てる機械で,そのような部品の先後加工があるものまたはないもの,例.プログラム制御付きのもの (845)
国際特許分類[B23P21/00]に分類される特許
101 - 110 / 845
機械視覚を用いた、手動の組立て作業をエラープルーフ化するためのシステム
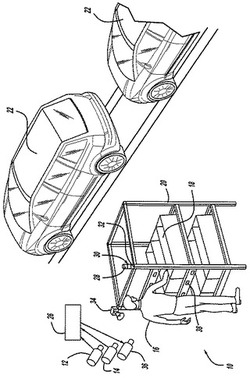
【課題】組立て工程中、適切な部品が、提示デバイスから選択されているかどうかを判定するエラー検出視覚システムを提供すること。
【解決手段】1つの実施形態では、提示デバイスは、複数の収納箱を含むラックであり、この場合収納箱は、複数の異なる部品を保持する。視覚システムは、光線を提示デバイスに向かって投射する1つまたは複数の投射デバイスと、作業者が提示デバイスから部品を選択するときに作業者から戻る反射を受け取るカメラなどの検出器とを含む。エラー検出視覚システムは、ビデオカメラの立体対、立体照明の三角測量を用いる視覚、および赤外線飛行時間型距離測定などのさまざま検出工程を使用することができる。
(もっと読む)
ロボットシステム

【課題】ワークを搬送しつつ、各工程でワークに対して作業を行うロボットシステムにおいて、設備の取り外しや追加の手間を減らす。
【解決手段】ロボットシステム20Bは、ワークWを受け取る受取り部と、ワークWを引き渡す引渡し部とを備える。システム20Bは、システム20Aの引渡し部からシステム20Bの受取り部へワークWを受け渡すロボット30Bと、受取り部から引渡し部へワークWを搬送するベルトコンベア22Bと、ワークWに対して作業を行う作業装置21Bとを備える。システム20Bは、ロボット30Bに設けられたRFIDタグ33Bと、ロボット30BがワークWを受取り部へ受け渡す際に、RFIDタグ33Bの情報を無線で読み込むリーダライタヘッド23Bと、ロボット30BがワークWを引渡し部から引き渡す際に、RFIDタグ33Bに情報を無線で書き込むリーダライタヘッド25Bと、を備える。
(もっと読む)
インホイールモータユニットのハブベアリング脱着方法および装置
【課題】ハブベアリングがスプライン嵌合されていた出力軸を芯だし状態に保ったままハブベアリングの脱着を行い得るようにして、この脱着作業を容易なものにする。
【解決手段】ハウジング3の外端に治具30を取り付け、スライダ37の板38にハブベアリング18のホイールハブ22を取り付け、レバー41によりハブベアリング18をハウジング3の端蓋19から図示位置に引き抜く。この状態で、ハブベアリング18が嵌合していた箇所に芯だしプレート43を嵌合して、出力軸9の芯だし状態を保持する。よって、ハウジング3の外端から治具30を取り外し、ハブベアリング18の交換後、再びハウジング3の外端に治具30を取り付けるまでの間も出力軸9は芯だし状態に保たれる。交換後のハブベアリング18を所定位置に嵌合させるに当たっては、芯だしプレート43を除去し、交換後のハブベアリング18を図示位置から左方へ変位させることで、当該ハブベアリング18の嵌合が可能である。
(もっと読む)
サイドメンバ組立ライン
【課題】サイドメンバの組立ラインを簡素化し、異なる車種のサイドメンバの組立を一本の組立ラインで行うことを可能とする。
【解決手段】本発明に係るサイドメンバ組立ライン100は、アウタパネル2にエクステンション4(中間部品)及びクウォーターインナ5(インナ部品)を完成品と同様の状態で仮組して仮組体1’を構成する仮組ステーション20と、仮組体1’を溶接ステーション30まで搬送する台車10(搬送手段)と、溶接ステーション30において仮組体1’からクウォーターインナ5を取り外すマテハンロボット33(保持手段)と、マテハンロボット33でクウォーターインナ5を取り外した状態で、アウタパネルとエクステンション4とを溶接する溶接ロボット31(第1溶接手段)と、マテハンロボット33でクウォーターインナ5を再びアウタパネル2に装着し、この状態でアウタパネル2とクウォーターインナ5とを溶接する溶接ロボット31(第2溶接手段)とを備える。
(もっと読む)
軸部材の位置決め装置および軸部材への圧入物の圧入機
【課題】位置決め装置において、周方向での軸部材の位置決め作業の効率向上を図る。
【解決手段】位置決め装置2において、カム軸が載置される仮受け部材12は、移載用駆動部材により駆動されて下降移動を行う可動台16に設けられる。仮受け部材12は、可動台16と共に下降移動することで本受け部材25にカム軸を移載し、かつ、駆動部材19により駆動されて、可動台16と共に軸方向移動を行うことにより本受け部材25に載置されている状態のカム軸を軸方向位置決め部材30に当接させる。カム軸の周方向位置を設定するために、可動周方向位置決め部材42は、駆動部材43により駆動されて、カム軸が有する位置決め用ピンに当接すると共に該ピンを固定周方向位置決め部材41との協働により周方向で挟持するまで、本受け部材25に載置されていると共に軸方向位置決め部材30に当接している状態のカム軸に、前記ピンを通じて周方向移動を行わせる。
(もっと読む)
同期台車
【課題】本発明は、車両に対して希望する位置に同期台車を配置して、その同期台車をコンベヤと同期走行させられるようにすることを目的とする。
【解決手段】本発明に係る同期台車20は、車両を載せて搬送するコンベヤ10と同期して走行可能に構成されており、部品箱29を載せるテーブル25を備える同期台車であって、コンベヤ10に吸着可能に構成された吸着部材31と、吸着部材31をコンベヤに対する吸着位置と、コンベヤから離れた格納位置間で移動可能に支持する吸着部材支持機構30と、部品箱29がテーブル25から離れることで、吸着部材31を格納位置から吸着位置まで移動させ、部品箱29がテーブル25に載せられることで、吸着部材31を吸着位置から格納位置まで移動させる吸着部材移動機構40,50とを有する。
(もっと読む)
搬送台車移動システム、搬送ライン及び搬送方法
【課題】ベース部品に対する下方と、ベース部品に対する上方及び側方との上下2段における作業を、別々の作業者によって同時間帯に行うことができる搬送台車移動システムを提供すること。
【解決手段】搬送台車移動システム1は、ベース部品8を載置する搬送台車3を、複数台連続して組付作業工程に移動させるよう構成してある。互いに隣接する搬送台車3間においては、搬送台車3Aの複数のポスト44Dと、搬送台車3Bの複数のポスト44Cとに、上方作業台7が架け渡してある。搬送台車3が移動する床面2には、上方作業台7に対する、搬送台車3の移動方向Dの左右両側に、固定作業台15が設置してある。搬送台車移動システム1は、搬送台車3が複数台連続して移動する際に、下方作業台5と、上方作業台7及び固定作業台15との上下2段の作業台において、ベース部品8に対して作業者Mが作業できるよう構成してある。
(もっと読む)
組立装置及び生産システム
【課題】カメラの振動を抑制しつつ、ロボットアーム及びワークを高精度に位置決め可能とする。
【解決手段】ロボットステーション100が、ロボットアーム101,102が固定される架台103と、架台103の作業領域209を含む領域を撮像するカメラ106と、カメラ106が固定されるブース104とを備える。架台103は床面に固定され、ブース104は、架台103とは接触せずに床面に固定される。また、ブース104は、平面視でワーク搬送方向Tと平行な短辺と、ワーク搬送方向Tと直交する長辺とを有する直方体形状に形成されている。そしてブース104は、平面視でブース104の長辺yの長さが、ロボットアーム101,102がワーク搬送方向Tと直交する方向に架台103から突出する最大の長さと、架台103のワーク搬送方向Tと直交する方向の長さとの和以上に設定されている。
(もっと読む)
ドライブプレート回転装置
【課題】簡易かつ安価な装置構成で、確実に所望する回転角度を保持しつつ、ドライブプレートを回転させることができるドライブプレート回転装置を提供する。
【解決手段】回転が入力される入力軸2bと、該入力軸2bに入力された回転を減速して出力する出力軸2cと、を備える減速機2と、入力軸2bに回転を入力するための駆動軸3cを備え、該駆動軸3cの回転角度を制御可能に構成される回転駆動装置3と、を備え、エンジン51のクランクシャフト52の一端部(締結ボルト52b)に、ソケット部2dを連結して、回転駆動装置3によって、駆動軸3cを所定の角度で回転させることによって、ドライブプレート55を、所定の角度(例えば60度ごと)で回転させるためのドライブプレート回転装置1であって、減速機2を、出力軸2cに回転を入力しても該出力軸2cおよび入力軸2bが回転しない特性(セルフロック特性)を有する減速機2により構成する。
(もっと読む)
ワーク搬送装置
【課題】簡素な構成でありながら、台車を任意の方向に移動させることができ、かつ、工程変更を容易に行なうことができるワーク搬送装置を提供する。
【解決手段】搬送方向Xにスリット2が形成された架台3と、上部がこの架台3のスリット2にガイドされるように架台3内に収容されるリボン体4と、このリボン体4の上端に連接されて架台3の上部に突出する台車連結部5と、このリボン体4をスリット2に沿って搬送方向Xに移動させる動力を供給する駆動部6と、ワークWを支持する支持部7aおよび前記台車連結部5に連結される連結部7b,7cを備え、前記架台3上を走行する治具台車7とを有する。
(もっと読む)
101 - 110 / 845
[ Back to top ]