
国際特許分類[B23P21/00]の内容
処理操作;運輸 (1,245,546) | 工作機械;他に分類されない金属加工 (71,475) | 金属の他の加工;複合作業;万能工作機械 (3,247) | ユニットを構成するべく種々の多数の部品を組立てる機械で,そのような部品の先後加工があるものまたはないもの,例.プログラム制御付きのもの (845)
国際特許分類[B23P21/00]に分類される特許
51 - 60 / 845
車体とパワープラントの結合方法および結合設備
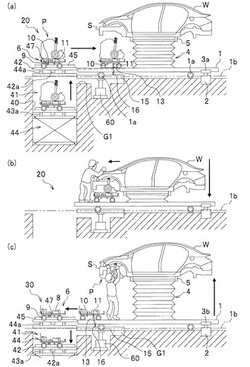
【課題】パワープラントを容易に車体に結合可能な車体とパワープラントの結合方法および結合設備を提供する。
【解決手段】車体Wを昇降自在に載置する昇降装置4を有し、フロアレベルの車体搬送ライン上を移動する搬送台車1と、パワープラントPを載置する載置パレット6と、載置パレット6を搬送台車1に移載する移載手段と、を有し、昇降装置4により車体Wを上昇させた状態で、載置パレット6を移載手段により搬送台車1に移載し、次いで、昇降装置4により車体Wを下降させてパワープラントPの上部取付部と車体側の取付穴とを締結して両者を一体にし、次いで、昇降装置4により車体Wを上昇させてパワープラントPの下部取付部と車体側の取付穴とを締結する。
(もっと読む)
面体フレームの個別住宅別生産方法、及び面体フレーム

【課題】 需要予測に基づく在庫管理をすることなく、多品種の面体フレームを生産することができる面体フレームの個別住宅別生産方法を提供する。
【解決手段】 面体フレームの個別住宅別生産方法は、工場で生産した多品種の面体フレームを施工現場で組み立てて構造躯体を形成する工業化住宅における面体フレームの個別住宅別生産方法であって、同一出荷日の面体フレームを構成する長手鋼材を同一断面形状毎に成形する成形工程と、前記成形工程で成形した前記長手鋼材を個別住宅毎であって、当該長手鋼材が構成する面体フレームの施工順に次工程に供給する供給工程と、前記施工順に前記長手鋼材を溶接して面体フレームを製造する溶接工程と、を備える。
(もっと読む)
自動二輪車の燃料タンク半体の位置決め・把持装置
【課題】自動二輪車の燃料タンク半体を精度良く把持できる位置決め・把持装置を提供することを課題とする。
【解決手段】位置決め・把持装置10は、給油口54を下にしたタンク上半体31の給油口54に嵌る嵌合部55を有し、嵌合部55に給油口54を嵌めて給油口54の三次元的位置を決定する第1治具20と、嵌合部55の放射溝に進入し広がって給油口54を押さえるクランプ機構69を有し、位置決めしたタンク上半体31を把持する第2治具30とを備える。
【効果】給油口を嵌合部に嵌めないで給油口を把持すると、クランプ機構が給油口に当たってタンク上半体が動き、クランプ機構の中心に対し給油口の中心がずれてタンク上半体を精度良く把持できない。本発明では嵌合部55で給油口54を位置決めしてから、クランプ機構69で給油口54を把持するため、タンク上半体31を精度良く把持できる。
(もっと読む)
ロボットシステム
【課題】一連の作業を複数の作業ロボットに作業分割して実行するロボットシステムで、一部の作業ロボットの一部の作業区分に遅延が発生しても、他の作業ロボットに待ち時間が発生することなく生産性を向上させる。
【解決手段】アームロボット6a〜6dに設けられたロボットコントローラ4a〜4dには、n個の作業区分を割り振る。アームロボット6eに設けられたロボットコントローラ4eには、n個よりも少ないm個の作業区分を割り振る。いずれかのアームロボット6での作業区分の作業で遅延が生じたときは、遅延が生じたアームロボットよりも下流のアームロボットに設けられたロボットコントローラに、未実施となっている作業区分を割り振りし直す再割り振り処理を実行する。再割り振り処理を実行する際には、各ロボットコントローラに割り振られる作業区分の数の上限はn個である。
(もっと読む)
部品圧入装置
【課題】構造が簡単で、安価に製作できる部品圧入装置を提供することを目的とする。
【解決手段】
市販品のアクチュエータ10を購入した後、アクチュエータ10のシリンダ12に開口部24を形成加工し、下端シリンダキャップ14上にワークホルダ36を取り付けると共に、ピストン20の下面にパンチ38を取り付ける。これにより、はす歯歯車26(被圧入物)の回転軸にベアリング28(圧入物)を圧入するための部品圧入装置を構成した。
(もっと読む)
シャフトとカムロブの組付方法及びその装置
【課題】小スペースでシャフトとカムロブが組付けできる組付方法及びその装置を提供する。
【解決手段】複数のカムロブを載せたパレット80を移動して第一のカムロブ3を準備する工程と、シャフト2の軸芯出しを行いながら両端を保持する工程と、シャフト2の外周に第一の隆起部2aを成形する工程と、パレット80を軸線方向に移動し、パレット80内から第一のカムロブ3を第一の隆起部2aに組付ける工程と、シャフト2の保持を解除しパレット80をシャフト2から取り外し、パレット80を移動して前記複数のカムロブから第二のカムロブを準備する工程と、シャフト2の軸芯出しを行いながら再度両端を保持する工程と、シャフト2の外周に第二の隆起部を成形する工程と、シャフト2の軸線方向の移動を規制した状態で、パレット80を軸線方向に移動し、パレット80内の前記第二のカムロブを前記第二の隆起部に組付ける工程と、を有する。
(もっと読む)
情報表示物およびその累積方法並びに情報表示物を掛けるボード
【課題】 記載されている特定の情報を容易に確認することができると共に、収集に必要な場所を省スペース化でき、且つ回収作業も容易に行うことができる情報表示物およびその累積方法並びに情報表示物用のボードを提供することを目的とする
【解決手段】 前面に特定の情報が記載された情報表示物であって前記情報表示物に切込みを入れることで形成された差込部を備え、前記切込みが差入口として使用可能に形成されており、第1の情報表示物の前記差入口に前面側から第2の情報表示物の差込部を挿入することで、第1の情報表示物の前面に第2の情報表示物を重ねた際に前記第1の情報表示物の前記特定の情報が視認可能に表示されるように、それぞれ同一の位置に前記特定の情報が記載された情報表示物およびその累積方法並びにその情報表示物用のボードを用いる。
(もっと読む)
作業ライン用コンベヤ設備
【課題】搬送用台車上の作業用床面では低くて作業者が積載ワークに対する作業が行い難くなる特定作業区間での作業性を、設備コストを低く抑えながら改善する。
【解決手段】ワーク搬送経路に沿って走行する搬送用台車1と、ワーク搬送経路中の一定区間に並設された作業者用コンベヤ9とを備え、搬送用台車1は、支持するワークWより横側方に張り出す作業用床面7を有し、作業者用コンベヤ9は、搬送用台車1の前記作業用床面7の上側に重なるように地上側に支持され、この作業者用コンベヤ9には、前記搬送用台車1の作業用床面7に当接して摩擦駆動される摩擦従動輪23aが軸支され、この摩擦従動輪23aと作業者用コンベヤ9の作業者搭乗面17aを形成するコンベヤベルト17とが、前記作業者搭乗面17aが前記作業用床面7と同一速度で移動するように連動連結された構成。
(もっと読む)
部品組付け作業システム
【課題】部品・作業工具受け持ちキャリヤーをその部品の被組付け対象物と同期して前進させることにより、その部品の組付け作業性を向上する。
【解決手段】互いに係脱作用する昇降ロッド(37)と揺動アーム(44)との1組を、部品・作業工具受け持ちキャリヤー(C)に取り付ける一方、昇降ロッドを引き下げて揺動アームとの係止状態を保つロッド引き下げ用具(51)とその引き下げ後の昇降ロッドを押し進める駆動片(52)とを、被組付け対象物(M)に設置して、上記キャリヤーを被組付け対象物と同期して前進往動させると共に、そのキャリヤーの往動中にある揺動アームの前端部が固定物(58)側から突出する受け止めストッパー(57)と衝突するや、上記揺動アームとの係止状態を解かれた昇降ロッドが上昇復帰して、キャリヤーだけが自づと後退復帰するように定めた。
(もっと読む)
生産システム、製品の製造方法及び物品収容容器の搬送方法
【課題】タクトタイムを低減できる生産システム、製品の製造方法及び物品収容容器の搬送方法を提供する。
【解決手段】生産システム10は、物品Pが収容された物品収容容器Cをそれぞれの物品供給位置に搬送する搬送機構36a〜36dが複数並んで設けられた物品供給機30と、物品供給位置にある物品収容容器C及びこれに収容された物品を把持して搬送する搬送装置34と、制御装置33とを備え、制御装置33は、物品供給機30に搬送機構36a〜36dの内の1つのみを選択して物品収容容器Cを物品供給位置に搬送させる機能と、搬送装置34に物品供給位置に搬送された物品収容容器Cから物品を把持して搬送位置へ搬送させる機能と、搬送装置34に物品供給位置に搬送された物品収容容器Cを把持し、物品供給位置から、別の搬送機構の物品供給位置の上方を通過して搬送位置に搬送させる機能とを有する。
(もっと読む)
51 - 60 / 845
[ Back to top ]