
国際特許分類[B25J13/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176)
国際特許分類[B25J13/00]の下位に属する分類
手でつかむ制御装置 (68)
足で操作する制御装置 (2)
制御台,例.コンソール,スウィッチ板 (73)
センサー手段,例.視覚または触覚装置,によるもの (1,069)
国際特許分類[B25J13/00]に分類される特許
101 - 110 / 964
ロボットの移動管理システム及び移動管理方法
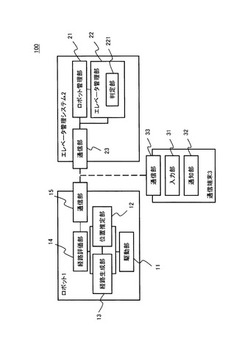
【課題】優先度の高低に基づいてロボットのエレベータへの搭乗順を設定する。
【解決手段】本発明の一形態に係るロボットの移動管理システム100は、位置推定手段12と、経路生成手段13と、ロボット1がエレベータ4で移動する際に消費可能な時間を算出る搭乗時間算出手段141と、並べ替えた搭乗順位に基づくロボット毎のエレベータ4で実際に移動する際に消費する時間を算出し、エレベータ4で実際に移動する際に消費する時間が、エレベータ4で移動する際に消費可能な時間以上であるか否かを判定する判定手段221と、判定結果に基づいて、該当するロボット1の遅延情報を生成する遅延情報生成手段142と、判定結果に基づいて、該当するロボット1に対して到着地点まで移動させる制御を実行させる移動指示手段143と、遅延情報が通知される通知手段32と、を備える。
(もっと読む)
ロボットの制御方法およびロボットの制御装置

【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、現在位置における各軸の回転角度を基準とした各軸の回転角度の変化量を示す各軸移動距離に基づく第1評価指標を設定し、ツールの先端位置を変化させないという束縛条件の下で、その第1評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
ロボットの制御方法およびロボットの制御装置
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間に基づく評価指標を設定し、その評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
ロボットシステム
【課題】対象物を固定しつつ旋回が必要となる作業を1台のロボットで行うことができるようにする。
【解決手段】ロボットシステム1は、ロボット100と、このロボット100の動作を制御するロボットコントローラ200とを備えている。ロボット100は、先端にツール150L,150Rを備えた2つのアーム103L,103Rと、これら2つのアーム103L,103Rを支持し、旋回させる胴体部120とを有している。ロボットコントローラ200は、2つのアーム103L,103Rのうち、少なくとも1つのアーム103の先端に備えられたツール150が旋回の前後を通じて同一の位置及び姿勢に保持されるように、ロボット100を制御する。
(もっと読む)
冗長関節部を有する冗長ロボットの制御装置および制御方法
【課題】 設定部分を目的とする固定位置に正確に維持したうえで、各関節部の角度を変更可能に冗長ロボットを制御する制御方法を提供する。
【解決手段】 第1〜第4関節部9〜12のうちで冗長関節部を除く残余の関節部の数が3つであり、対象点Phが3次元位置で固定される。対象点Phの3次元位置(phx,phy,phz)と、第1〜第4関節部9〜12の各角度q1〜q4を変数として対象点Phの3次元位置を求めるための順変換関係式と、冗長関節部の冗長角度とに基づいて、対象点Phが3次元位置で固定されるべき、第1〜第4関節部9〜12の角度q1〜q4をそれぞれ演算する。これによって未知数が3つの3元連立方程式を解析的に解くことができ、対象点Phを予め定める3次元位置に配置した場合における、第1〜第4関節部9〜12の角度q1〜q4を正確に求めることができる。
(もっと読む)
ロボットの軌道計画システム及び軌道計画方法
【課題】少ないノードで軌道計画の成功率を向上させることができる、ロボットの軌道計画システムを提供する。
【解決手段】本発明の一形態に係るロボットの軌道計画システム10は、グラフ構造データ格納手段に格納されているグラフ構造に対して、スタートノード及びゴールノードを追加し、さらに最終姿勢のハンドの周辺空間にノードを追加して、追加したノードと、隣接するノードとをエッジで接続し、スタートノードからゴールノードまでを結ぶ経路を探索するグラフ構造探索処理手段と、グラフ構造探索処理手段により探索された経路に含まれるノードが示す姿勢が、環境情報と干渉するか否かを判定し、干渉していると判定した場合には、ノードをグラフ構造から除外するノード有効性判定手段と、を備える。
(もっと読む)
装着型動作支援装置
【課題】
少なくともしゃがんだ状態から立ち上がる動作を補助することができ、使用時に受ける違和感が少ない装着型動作支援装置を提供する。
【解決手段】
本発明に係る装着型動作支援装置100は、膝上フレーム部103に取り付けられており、使用者Hがしゃがんだ状態で、膝駆動装置30が膝上フレーム部103を立ち上げる方向へ回転駆動することにより、使用者Hの大腿部と臀部の境界部分に接して使用者の臀部を押し上げる臀部支持部材50を有しており、さらに、膝上フレーム部103に取り付けられており、使用者Hの大腿部の付け根付近の前面及び股下を通って臀部支持部材50に連結され、臀部支持部材50を吊る吊り部材80を有している。
(もっと読む)
走行ロボットのやり直し走行、そのティーチング方法および制御方法
【課題】パスとランドマークの系列からなる経路情報に基づいて出発点から目的地点まで移動する歩行ロボットが、経路上にある障害物や道路工事中の箇所に遭遇したとき、走行できなくなる。そこで、経路情報に基づく走行を中断し、走行をやり直してから元の経路に戻る方法が課題である。
【解決手段】走行をやり直す方法を定型経路情報で表し、ティーチングで作成する。定型経路情報とは、経路情報を構成するパスやランドマークの種類や順序は決まっているが、パスの始端・終端の位置方位などの値は、実行時のセンサーのデータや通路幅などによって決まる形式の経路情報を言う。
【効果】走行ロボットの車体やセンサー、コンピュータなどは常に改良されて行く。改良の度にソフトウエアを修正する労力と現場でテストするのは大変である。本発明は、定型経路情報をティーチングにより改良するだけで良いので、労力と手間が大幅に少なくなる。
(もっと読む)
自動作業装置
【課題】ワークの種別を自動的に判別する自動作業装置のコストを抑えること。
【解決手段】ワークを把持したか否かを検知するセンサを備えたロボットハンドへ作業対象となるワークを供給する供給容器に、ワークの種別を示す被把持部を予め設けておき、作業の開始前に、ロボットハンドによって供給容器の被把持部を把持させる模擬動作を行い、ロボットハンドによる被把持部の把持位置および把持結果に基づいてワークの種別を判別するように自動作業装置を構成する。
(もっと読む)
少なくとも2本のロボットアームの同期化システムおよびその制御方法
【課題】少なくとも2本のロボットアーム相互間の同期化制御を行う。
【解決手段】ロボットマルチアーム制御システムは、製造プロセスを調整すべく、1またはそれ以上のスレーブコントローラに対しマスターコントローラからの同期化情報を伝送するため、ネットワークを介して通信するロボットコントローラを含む。該システムは、プロセスおよび運動の同期化のためイベントタイミングを同期化する場合に、ネットワーク通信の遅延を計算に入れる。
(もっと読む)
101 - 110 / 964
[ Back to top ]