
国際特許分類[B25J13/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176)
国際特許分類[B25J13/00]の下位に属する分類
手でつかむ制御装置 (68)
足で操作する制御装置 (2)
制御台,例.コンソール,スウィッチ板 (73)
センサー手段,例.視覚または触覚装置,によるもの (1,069)
国際特許分類[B25J13/00]に分類される特許
11 - 20 / 964
回転導入機、ロボット装置、回転導入方法
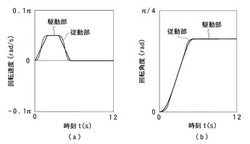
【課題】従動部又は駆動部の内部構造に改造を加える必要がなく、従動部の固有振動を容易に抑制することができる磁気結合式回転導入機、ロボット装置、回転導入方法を提供する。
【解決手段】互いに対向して配置され、互いの対向する表面にはそれぞれ、同一の回転軸線を中心とする円周に沿ってN極とS極の磁極が交互に並んで設けられた従動部と駆動部とを用いて、駆動部を回転軸線を中心に回転させ、駆動部の磁極から従動部の磁極にかかる磁力により、従動部を駆動部の回転方向と同じ方向に回転させる際に、従動部の固有振動数ωを予め求めておき、静止状態にある駆動部を、下記数式(1)を満たす加速時間taだけ等増速加速度で加速させて回転速度bで回転させることにより、静止状態にある従動部を回転速度bで回転させる。すると、以後の従動部の固有振動が抑制される。 (もっと読む)
(もっと読む)
荷役装置及び荷役方法

【課題】同一のパレットに対して複数のロボットハンドをアクセスさせる構成を備えながら、ロボットハンド同士が接触しないように、かつ作業速度を向上させることができる荷役装置及び荷役方法を提供する。
【解決手段】パレット上の複数のアクセス位置に対して、ワークの荷役を行う荷役装置であって、前記パレット上の前記複数のアクセス位置に順次アクセスする複数のハンドと、前記複数のハンドのうちの第1のハンドのアクセス位置を管理する管理部と、前記第1のハンドの前記アクセス位置に応じて前記複数のハンドのうちの前記第1のハンドとは異なる第2のハンドの移動経路を決定する決定部とを備える。
(もっと読む)
ロボットアーム装置
【課題】安価で軽量化が可能なロボットアーム装置を提供する。
【解決手段】ロボットアーム装置1は、基体4とリンク部材3とが第1の関節機構J1で連結され、リンク部材3とエンドエフェクタEとが第2の関節機構J2で連結されたロボットアーム2を備える。ロボットアーム装置1は、ロボットアーム2から基体4に作用する力を検出する第1の力検出器F1を備え、基体4の基端部の端面4aにロボットアーム2の制御配線11用の開口部4bが形成され、開口部4bの周囲において、第1の力検出器F1として、相互に離間して配置されている3個以上の力検出器F1-iが配置されている。
(もっと読む)
サービスロボット
【課題】高い処理能力を必要とせずに多様な行動を自律的かつインタラクティブに取ることが可能なサービスロボットの制御技術を提供する。
【解決手段】条件記憶部83は、センサアレイ7を構成する赤外線測距センサ71a〜71cごとに、モーションプログラムとこのモーションプログラムの実施条件であるセンサ値範囲との対応関係を記憶している。モーションID検出部85は、センサアレイ7を構成する赤外線測距センサ71a〜71cのセンサ値を順番に繰り返し取得し、センサ値の取得元の赤外線測距センサ71a〜71cの実施条件のなかから、取得したセンサ値を含む実施条件を検出する。そして、この実施条件に対応付けられているモーションプログラムを実行してモータ5、61、62を制御し、腕付きトルソ型サービスロボット1に行動をさせる。
(もっと読む)
運動促進ロボット
【課題】運動習慣を形成するために運動への動機付けをユーザーに与える運動促進ロボットを提供する。
【解決手段】本発明は、運動への動機付けをユーザーに与える運動促進ロボットである。頭部11及び腕部12及び脚部13を有する本体1と、頭部11及び腕部12及び脚部13を駆動する駆動部2と、本体1に設けられたスピーカー15と、駆動部2及びスピーカー15を制御する制御部6とを備える。制御部6は、ユーザーの運動のメニューに対応した音声をその運動に合わせたタイミングで出力させる音声制御部64と、前記音声の出力に合わせて前記駆動部2を駆動させる駆動制御部65とを有している。
(もっと読む)
歩行補助装置及びその制御方法
【課題】転倒を防止し、かつ負担を感じることなく、利用者が着座することができる歩行補助装置及びその制御方法を提供すること
【解決手段】本発明にかかる歩行補助装置は、利用者の脚の大腿に装着される第1のリンク2と、下肢に装着される第2のリンク3と、両者を相対的に回転駆動する駆動部6と、駆動部6を制御する制御部92を備えている。制御部92は、利用者の着座動作を検出した後は、第2のリンク3に対する第1のリンク2の角度が予め定めた所定角度よりも大きい間は位置制御を実行し、所定角度以下の間はダンパ制御を実行する。
(もっと読む)
ロボット制御インターフェイスの動的最適化のための方法
【課題】コントローラ内にデータを入力し、かつ/またはロボットシステムを制御するための制御インターフェイスを、人間−機械インターフェイスデバイス上に表示すること。
【解決手段】表示される制御インターフェイスの特定の構成は、実施される作業、ロボットシステムの性能、人間−機械インターフェイスデバイスの性能、およびユーザの専門知識のレベルに基づく。制御インターフェイスの特定の構成は、上記の基準に基づいて、ユーザとロボットシステムの間の相互作用を最適化するように設計される。
(もっと読む)
ロボットシステム
【課題】生産性を向上できるようにする。
【解決手段】らっきょう12を搬送するコンベア14と、コンベア14による搬送経路上を搬送されてくるらっきょう12の3次元形状を検知する3次元センサ18と、らっきょう12に対し持ち上げつつ移送する作業を行うためのツールを取り付け可能なロボット16A,16Bと、ロボット16A,16Bに対し動作指令を出力すると共に、3次元センサ18の検知結果に基づき、動作指令の補正を行うコントローラ28とを有しており、コントローラ28は、ロボット16に対し、補正後の動作指令を出力する。
(もっと読む)
製函装置
【課題】 装置全体をコンパクトにすることができる製函装置を提供する
【解決手段】 開口した箱体の4つの壁面に連続した蓋フラップを折り畳んで蓋をする機能を備えた製函装置である。6軸の2つのロボットアーム11,12の先端に吸着具13,14を設ける。吸着具は、蓋フラップを折り畳むための平板13a,14aと、カートン20や小箱15を吸着する吸着ノズル13b,14bを有する。2つの吸着具で折り畳まれたカートンを開くとともに製函位置Aにセットし、また、小箱を箱体内に供給する。平板を所定の軌跡で移動させ、蓋フラップを順次折り畳み蓋を閉じる。蓋フラップを閉じたまま、1つの平板が箱体の壁面を付勢することで次段のテープ貼り装置に供給する。
(もっと読む)
対象物加工システム
【課題】対象物が不定形物である場合でも、加工の際の対象物間での加工部位のばらつきを抑制できるようにする。
【解決手段】らっきょう切断加工システム10は、コンベア14と、ロボット16と、らっきょう12を検知する3次元センサ18と、らっきょう12の姿勢を検知するカメラ20と、コントローラ28とを有し、コントローラ28は、3次元センサ18の検知結果に基づきらっきょう12の吸着目標部位の設定を行う第1画像処理部281と、吸着パッド166をらっきょう12の吸着目標部位に接触させ当該らっきょう12を持ち上げつつ所定の位置へ移動させるように、ロボット16を制御する第1制御部2861と、カメラ20の検知結果に基づきらっきょう12の加工目標部位の設定を行う第2画像処理部283と、らっきょう12の加工目標部位が切断装置22の刃2221の位置へ導かれるように、ロボット16を制御する第2制御部2862とを有する。
(もっと読む)
11 - 20 / 964
[ Back to top ]