
国際特許分類[B25J13/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176)
国際特許分類[B25J13/00]の下位に属する分類
手でつかむ制御装置 (68)
足で操作する制御装置 (2)
制御台,例.コンソール,スウィッチ板 (73)
センサー手段,例.視覚または触覚装置,によるもの (1,069)
国際特許分類[B25J13/00]に分類される特許
31 - 40 / 964
高粘度流体塗布装置
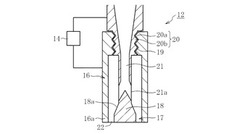
【課題】塗布作業中におけるノズルとワークとの接触を検知し、これに起因して生じる塗布不良を可及的に回避する。
【解決手段】本発明に係る高粘度流体塗布装置は、高粘度流体を吐出可能なノズル12を少なくとも具備する。ノズル12は、筒部16と、筒部16の内周に配設され筒部16の吐出側16aとの間に隙間17を形成する隙間形成部18と、絶縁体19を介して筒部16と隙間形成部18とを連結する連結部20とで構成され、筒部16と隙間形成部18との間の電気抵抗を検出する電気抵抗検出手段14をさらに具備したことを特徴とする。
(もっと読む)
ロボットシステムにおけるロボットの停止方法およびロボットシステム

【課題】複数台のロボットのうち、停止させようとするロボットが実際にどのロボットであるかを識別できるようにする。
【解決手段】複数台のロボット2〜5を制御する制御装置6の教示装置7を操作して1台のロボットを選択すると、選択されたロボットを除く他のロボットの移動速度が減少する(告知動作)。この告知動作により、選択したロボットを識別できる。告知動作しなかったロボットを停止させる場合、教示装置7を操作する。告知動作しなかったロボットと停止させようとしていたロボットが異なる場合、教示装置7を操作しないでおくと、その後、告知動作したロボットが加速して作業動作を終了する時点が常と同じ時期となるように制御される。
(もっと読む)
搬送装置及びそれを用いたワークの搬送方法
【課題】搬送時におけるワークの撓みによる品質低下やワーク落下を防止できる搬送装置及びそれを用いたワークの搬送方法を提供すること。
【解決手段】本発明は、対向するロボット10が同時にワークWを把持し、該ワークWを搬送する搬送装置100において、各ロボット10が、基部1と、該基部1に回動自在に取り付けられたアーム部2と、該アーム部2の先端に設けられた把持部3と、該把持部3に取り付けられた当接部4とを備え、対向するロボット10の当接部4同士が弾圧的に圧接された状態で、ワークWが搬送される搬送装置10である。
(もっと読む)
ロボット制御装置、外乱判定方法およびアクチュエータ制御方法
【課題】ロボットアームに加わる外乱を高精度に検出することが可能なロボット制御装置、外乱判定方法およびロボット制御方法。
【解決手段】実施形態のロボット制御装置は、アームの駆動軸を回転駆動するアクチュエータと、前記駆動軸の回転角度をサンプリング周期ごとに検出する第1検出部と、前記アクチュエータの駆動トルクの推定値と、前記駆動トルクの真値との差分を算出する算出部と、前記アームに加わる外乱を検出する第2検出部とを備え、前記第2検出部は、前記差分を変数とする時系列モデルのパラメータを推定し、前記パラメータを当てはめることで、第1サンプリング周期の当該時系列モデルを更新する更新部と、前記第1サンプリング周期の時系列モデルと前記第1サンプリング周期よりも過去の第2サンプリング周期の時系列モデルとを比較して、前記アームへの外乱の有無を判定する判定部とを備える。
(もっと読む)
ロボットシステム
【課題】モータの駆動を制御する駆動制御手段の制御内容を変更することなく、高トルク運転時にモータに対して十分な電力を供給することができるとともに、減速動作時にモータから生じる回生エネルギーを有効利用することを可能とする。
【解決手段】昇降圧回路29は、入力電圧を昇圧して出力する昇圧動作、入力電圧を降圧して出力する降圧動作、入力電圧の供給が遮断する電源遮断動作などを実行する。電源制御部26は、バス電圧の検出値に基づいて、モータMが加速動作状態であると判断される期間には昇圧動作を実行し、減速動作状態であると判断される期間には電源遮断動作を実行し、それらの期間を除く期間には降圧動作を実行するように昇降圧回路29の動作を制御する。
(もっと読む)
サービス提供システム、サービス提供方法、携帯端末装置及びプログラム
【課題】サービス提供装置からユーザに対して、該ユーザのサービス提供装置に対する感覚に応じたサービスを提供できるサービス提供システム及び方法を提供する。
【解決手段】携帯端末装置は、ユーザによる該携帯端末装置を用いたサービス提供装置の操作履歴を保存し、該操作履歴に基づき該ユーザがサービス提供装置にどの程度慣れているかを示す慣れ情報を生成して保存する。サービス提供装置は、ユーザによる携帯端末装置を用いた操作時、該携帯端末装置から慣れ情報を取得し、慣れ情報に応じて予め設定された複数のサービスのなかから該取得した慣れ情報に対応するサービスを選択し、該選択したサービスを該ユーザへ提供する。
(もっと読む)
基板搬送システム、基板処理システムおよび基板搬送ロボット
【課題】ロボット設置領域を小さくして小型化を図ることが可能な基板搬送システムを提供する。
【解決手段】この基板搬送システム10は、アーム部(第1アーム部123および第2アーム部124)およびハンド部125を水平面内で回動させることによって、処理装置20側に設けられた開口部202を介して基板収納装置11内から処理装置20内に基板110を搬送するとともに、ハンド部125により基板110を支持した状態の最小旋回領域の外縁が開口部202を介して処理装置20内に突出するように構成された基板搬送ロボットを備えている。
(もっと読む)
インタラクションシステム、インタラクティブシステム及びプログラム
【課題】インタラクションシステム、インタラクティブシステム及びプログラムにおいて、インタラクションの整合性を保つように周期動作処理及び非同期イベント処理の実行内容を変更することを目的とする。
【解決手段】インタラクティブ装置の状態に関する非同期のイベント情報を受信する受信部と、周期的に実行されて前記インタラクティブ装置のアクションを指示するアクション指示を出力する周期動作処理を定義する周期動作処理定義、イベント情報に応じてインタラクションの内容の詳細に表す動作情報を更新するイベント処理定義、及び動作情報を定義する動作情報定義を受け付ける受付部と、周期動作処理定義、イベント処理定義、及び動作情報定義を一括で更新する更新処理部を備えるように構成する。
(もっと読む)
産業用ロボットの消費電力モニタ装置
【課題】
産業用ロボットにおいて、消費電力の節約に役立てることができるツールが存在しない。
【解決手段】
ロボット制御装置10はマニピュレータ30を駆動するサーボモータに供給される電力を電力検出部23にて検出し、記憶部15は、作業プログラムのステップ毎に、電力検出部23が検出した電力の累積消費電力量を記憶する。モニタ表示部41は、記憶部15が記憶した作業プログラムのステップ毎の累積消費電力量を通知する。作業プログラムのステップ毎に産業用ロボットの消費電力が記憶されて通知されることにしたことによって、急加速や急減速のステップを見直したり、待機時間を減らしたりすることができる。すなわち、タクトタイムとのバランスを取りながら、消費電力を節約することができる。
(もっと読む)
基板搬送システム、基板処理システムおよび基板搬送ロボット
【課題】ロボット設置領域を小さくして小型化を図ることが可能な基板搬送システムを提供する。
【解決手段】この基板搬送システム10は、アーム部(第1アーム部123および第2アーム部124)およびハンド部125を水平面内で回動させることによって、処理装置20側に設けられた開口部202を介して基板収納装置11内から処理装置20内に基板110を搬送するとともに、ハンド部125により基板110を支持した状態の最小旋回領域の外縁が開口部202を介して処理装置20内に突出するように構成された基板搬送ロボットを備えている。
(もっと読む)
31 - 40 / 964
[ Back to top ]