
国際特許分類[B25J13/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176)
国際特許分類[B25J13/00]の下位に属する分類
手でつかむ制御装置 (68)
足で操作する制御装置 (2)
制御台,例.コンソール,スウィッチ板 (73)
センサー手段,例.視覚または触覚装置,によるもの (1,069)
国際特許分類[B25J13/00]に分類される特許
41 - 50 / 964
基板搬送システム、基板処理システムおよび基板搬送ロボット
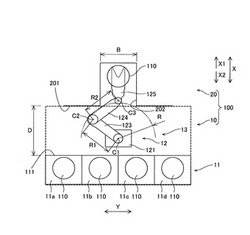
【課題】ロボット設置領域を小さくして小型化を図ることが可能な基板搬送システムを提供する。
【解決手段】この基板搬送システム10は、アーム部(第1アーム部123および第2アーム部124)およびハンド部125を水平面内で回動させることによって、処理装置20側に設けられた開口部202を介して基板収納装置11内から処理装置20内に基板110を搬送するとともに、ハンド部125により基板110を支持した状態の最小旋回領域の外縁が開口部202を介して処理装置20内に突出するように構成された基板搬送ロボットを備えている。
(もっと読む)
ロボット装置、ロボットシステム、及び紐状体包装製品の製造方法

【課題】作業者の労力負担を低減しつつ生産性を向上できるようにする。
【解決手段】ロボット装置24は、旋回ベース42、下部アーム44、上部アーム46、及び手首部48と、手首部48に設けられ、麺線群12の長手方向中間部を支持する又は当該支持を解除するハンド50と、旋回ベース42、下部アーム44、上部アーム46、手首部48、及びハンド50の動作を制御するコントローラ36とを有しており、コントローラ36は、ハンド50が、麺線群12を支持する位置である支持位置から支持を解除する位置である解除位置までの間の少なくとも一部の区間において斜め上方に向けて移動するように、旋回ベース42、下部アーム44、上部アーム46、及び手首部48を制御する。
(もっと読む)
ロボット制御装置、ロボットシステム、ロボット制御方法、ロボット制御プログラム
【課題】命令の並列実行について特に指定されていないシナリオを取得した場合も、並列実行の可否を判断して命令を実行できる技術を提供する。
【解決手段】複数の動作主体のそれぞれを互いに異なるリソースとして含む複数の前記リソースのうち少なくとも一つの前記動作主体を占有する命令を直列的な実行順に複数並べたシナリオを取得するシナリオ取得手段と、前記リソースごとに、当該リソースを占有する未実行の前記命令を前記シナリオの前記実行順に従って並べた命令キューを生成する命令キュー生成手段と、占有する前記リソースの全てに対応する前記命令キューにおいて前記実行順が最も先である前記命令を複数並列に実行させる命令実行手段と、を備える。
(もっと読む)
ロボットの位置姿勢補間方法及びロボットの制御装置
【課題】ロボットの手先の姿勢が一定の条件を満たすように補間できるロボットの位置姿勢補間方法を提供する。
【解決手段】各教示点を通過する移動軌跡がスプライン曲線となるように補間点を生成し(S3)、各教示点毎に、教示点と同じ座標系における撮像対象物の座標を求め、各教示点に対応する撮像対象物の座標間を、スプライン曲線により補間して補間点を生成する(S4)。教示点側の補間点を始点,撮像対象物側の補間点を終点とするアプローチベクトルを全ての補間点に対して求め(S5)、2つの教示点間の各補間点におけるノーマルベクトルの回転角を補間すると(S6)各補間点に立つアプローチ,ノーマルベクトルの外積よりオリエントベクトルを求め(S7)各補間点と3つの姿勢ベクトルの座標とから各補間点における手先の姿勢を決定する。
(もっと読む)
梱包装置
【課題】梱包作業の効率化を図ること。
【解決手段】実施形態に係る梱包装置は、供給ステーション、右エンドエフェクタおよび左エンドエフェクタ、右アーム部および左アーム部、組立ステーションを備える。供給ステーションは、折り畳まれた状態の段ボールが載置される場所である。右エンドエフェクタおよび左エンドエフェクタは、物体を吸着する吸着部を備える。右アーム部および左アーム部は、それぞれ右エンドエフェクタおよび左エンドエフェクタを備える。組立ステーションは、立体的に展開された段ボールが載置される場所である。梱包装置は、供給ステーションへ載置された段ボールの両側面を各吸着部を用いて吸着し、右アーム部および左アーム部を用いて段ボールを展開させ、組立ステーションへ移動させる。
(もっと読む)
ロボットアーム制御装置、制御方法及びプログラム
【課題】把持対象物を最適に把持できるロボットアーム制御装置、制御方法及びプログラムを提供すること。
【解決手段】ロボットアーム制御装置1は、ロボットアーム2を制御して把持対象物を把持する。また、ロボットアーム制御装置1は、把持対象物を把持したときのロボットアーム2の姿勢状態毎に、ロボットアーム2の位置を複数の方向に夫々摂動させたときに摂動に対して把持状態の頑健性が高い方向を算出する頑健性算出手段と、複数のロボットアーム2の姿勢状態の中から、所定の誤差が大きい方向と頑健性算出手段により算出された頑健性が高い方向とが近くなる、ロボットアーム2の姿勢状態を選択する選択手段と、を備えている。
(もっと読む)
マニピュレータの制御装置
【課題】手先の目標位置姿勢を指示してから駆動するまでの制御時間の短縮を図りながら、マニピュレータと構造物との衝突回避を図ることができるマニピュレータの制御装置を提供する。
【解決手段】制御装置14は、多数のマニピュレータ分割表面A1〜Amのうちのいずれか1つと多数の構造物分割表面B1〜Bnのうちのいずれか1つとの組合せを所定の件数だけランダムに抽出して抽出リストを作成し、その抽出リストの各組合せにおける仮想配置のマニピュレータ分割表面と構造物分割表面との重心間距離を演算し、この重心間距離によりマニピュレータ分割表面と構造物分割表面が衝突する可能性の高いものと判定した組合せからなる候補リストを作成する。そして、候補リストの各組合せにおいて仮想配置のマニピュレータ分割表面と構造物分割表面が衝突するかどうかを判定し、衝突すると判定した場合に、衝突を回避するように関節の目標回転角を補正する。
(もっと読む)
ロボット
【課題】組立作業やメンテナンス作業の作業効率を向上させることができる。
【解決手段】各フィンガー3a〜3cは、ベース部材4a〜4cと、一端がベース部材に旋回可能に支持されたリンク部材5a〜5cと、を有する。本体1には、フィンガー3a〜3cが取り付け可能な複数の取付部2a〜2cが設けられており、各取付部2a〜2cには、各フィンガー3a〜3cが取り付けられる。各フィンガー3a〜3cのリンク部材は、各電動回転モータ7a〜7cにより駆動される。各取付部2a〜2cの近傍には、ストッパ部材15a〜15cが設けられている。ストッパ部材15a〜15cは、互いに異なる高さに設定されており、各取付部におけるリンク部材の旋回可能範囲を、互いに異ならせている。制御装置8は、これら旋回可能範囲の違いに基づいて、各電動回転モータ7a〜7cと各取付部2a〜2cとの対応関係を認識する。
(もっと読む)
物品処理装置
【解決手段】 直列に配置された分割コンベヤ3A〜3C毎にそれぞれロボット4A〜4Cが設けられている。各ロボットは各分割コンベヤに供給された物品を、例えば10本を一まとめとしてバケットコンベヤ5の1つのバケット5a内に受け渡すことができるようになっている。各分割コンベヤは、搬送コンベヤ2から多くの物品が供給されている状態ではそれぞれ連続して運転されているが、各分割コンベヤへの物品の供給がなくなると停止されるようになっている。各分割コンベヤは、物品が新たに供給される都度間欠的に運転され、それによって各分割コンベヤ上に所定数の物品を貯溜させるようになる。各割コンベヤ上に所定数の物品が貯溜されたら、該物品は一まとめとしてバケット内に受け渡される。
【効果】 各割コンベヤ上に所定数の物品を貯溜することができるので、各ロボットによる所定本数ずつの処理を効率的に行える。
(もっと読む)
交換可能なプローブを組み込んだ非破壊検査のシステムおよび方法
【課題】ロボットアームと、ロボットアームに近接した保管デバイスと、保管デバイス内に配置された複数の非破壊検査(NDI)プローブ組立体とを含む非破壊検査デバイスを提供すること。
【解決手段】それぞれの非破壊検査プローブ組立体450は、部品の非破壊検査のために動作可能な少なくとも1つのトランスデューサ、およびロボットアームと対応する非破壊検査プローブ組立体450との間の機械的インターフェースとして動作可能なツールを含む。それぞれの非破壊検査プローブ組立体450は、部品の非破壊検査のための特定の非破壊検査タスクのために構成されており、ロボットアーム302は、部品の少なくとも一部の非破壊検査のために、ツールおよびプローブ組立体450の動きに選択的に係合するために動作可能である。
(もっと読む)
41 - 50 / 964
[ Back to top ]