
国際特許分類[B25J13/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176)
国際特許分類[B25J13/00]の下位に属する分類
手でつかむ制御装置 (68)
足で操作する制御装置 (2)
制御台,例.コンソール,スウィッチ板 (73)
センサー手段,例.視覚または触覚装置,によるもの (1,069)
国際特許分類[B25J13/00]に分類される特許
51 - 60 / 964
交換可能なプローブを組み込んだ非破壊検査のシステムおよび方法
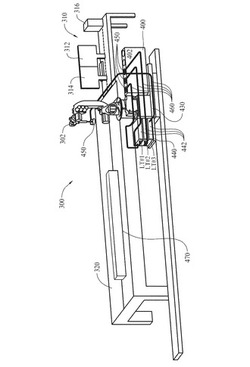
【課題】ロボットアームと、ロボットアームに近接した保管デバイスと、保管デバイス内に配置された複数の非破壊検査(NDI)プローブ組立体とを含む非破壊検査デバイスを提供すること。
【解決手段】それぞれの非破壊検査プローブ組立体450は、部品の非破壊検査のために動作可能な少なくとも1つのトランスデューサ、およびロボットアームと対応する非破壊検査プローブ組立体450との間の機械的インターフェースとして動作可能なツールを含む。それぞれの非破壊検査プローブ組立体450は、部品の非破壊検査のための特定の非破壊検査タスクのために構成されており、ロボットアーム302は、部品の少なくとも一部の非破壊検査のために、ツールおよびプローブ組立体450の動きに選択的に係合するために動作可能である。
(もっと読む)
ねじ締め装置およびねじ締め方法

【課題】 可搬重量の小さいロボットによるねじ締め装置およびねじ締め方法を提供する。
【解決手段】
6軸を有する垂直多関節ロボット1と、垂直多関節ロボット1の先端回転軸となるロボット第6軸先端に取り付けるフランジ2と、ビットホルダ3を介してこのフランジ2に取り付けられるビット4と、を備え、ゲイン制御を行いながら先端回転軸を回転させることにより、ねじ締めを行なうようにした。
ねじ締め始め時においては、ビット押し付け力が大きいと、ねじがかじる不具合があるため、ねじ締め始め時はねじが進行していく程度の小さな押し付け力になるようにZ軸ゲインG1を調整する。一方、トルクアップ時においては、ビットの押し付け力が小さいと、ビットがねじ溝から外れてねじをなめてしまうため、ねじ締め始め時よりも大きな押し付け力になるようにZ軸ゲインG2を調整する。
(もっと読む)
ロボットシステム
【課題】シャフトに対して環状部品を嵌合する組立作業をロボットによって自動的に行う場合に、歩留まりを向上させること。
【解決手段】ロボットシステムは、環状部品の内周面と係合する係合部材を周面に取付け可能なシャフトを把持して回動させるロボットと、前記環状部品を固定するための冶具と、前記環状部品が嵌合された前記シャフトを前記ロボットによって把持させ、該環状部品を前記冶具へ接触させた状態で、前記ロボットによって該シャフトへ回動力を付加させる制御部と、前記回動力を付加させた場合における前記ロボットの動作に基づいて前記シャフトへ前記係合部材が取付け済みか否かを判定する判定部とを備える。
(もっと読む)
接着剤塗布装置
【課題】汎用性を向上することができるようにする。
【解決手段】接着剤塗布装置10は、ロボットアーム12aを備えたロボット12と、ロータ56を設置するためのロータセット治具14と、接着剤を収容したカートリッジ58を装着可能なホルダ部16aを備え、当該ホルダ部16aに装着されたカートリッジ58内の接着剤を吐出する、ロボットアーム12aの先端に取り付け可能なガン16と、所定圧の圧縮エアの、ガン16のホルダ部16aに装着されたカートリッジ58内への供給をオン・オフ切替制御する電磁弁22と、ロボット12の動作を制御するロボットコントローラ50と、電磁弁22によるオン・オフ切替制御、及び、ロボットコントローラ50によるロボット12の動作制御を連携して制御する上位コントローラ52とを有する。
(もっと読む)
負荷制御システムおよび負荷駆動システム
【課題】負荷駆動のためのアクチュエータ等の負荷駆動要素を複数制御する場合、その制御システム構築が容易となる負荷制御システムを提供する。
【解決手段】負荷駆動のための複数の負荷駆動要素のそれぞれを駆動制御するために、該複数の負荷駆動要素に対応して設けられる複数のドライバを含む負荷制御システムであって、複数のドライバのそれぞれは、自ドライバに直接関連付けられた負荷駆動要素を制御する制御部を有する。そして、複数のドライバのそれぞれは、負荷制御システムにおいて、自ドライバの制御部から該自ドライバを除く他のドライバの全部または一部の対象ドライバの制御部に対して、該対象ドライバに直接関連付けられた負荷駆動要素の駆動制御を行うための指令信号の送信が可能となる相互制御通信状態が形成されるように、互いに電気的に接続される。
(もっと読む)
制御装置、制御方法、プログラム、及びロボット制御システム
【課題】簡易な操作により、自律型ロボットによる探索範囲を指定する。
【解決手段】制御部は、所定の物体を自律的に探索するロボットに探索させる探索範囲がユーザにより指定されたことに対応して、探索範囲を特定するために用いられる特定情報を生成し、通信部は、特定情報をロボットに送信することにより、ロボットに探索範囲を探索させる。本開示は、例えば、自律型ロボットを制御可能であって、ロボットからの情報を表示部の表示画面に表示させる表示制御装置等に適用することができる。
(もっと読む)
塗装システムおよびドア開閉用ロボットの開閉ハンド
【課題】走行装置を用いることなくドアの内側部の塗装を行うことが可能な塗装システムを提供する。
【解決手段】この塗装システム100は、車体120を搬送するコンベア10と、高さ位置H2に固定的に設置され、コンベア10による車体120の搬送動作に追従するように姿勢を変化させて車体120のドア121の内部を少なくとも塗装する塗装用ロボット20と、高さ位置H2とは異なる高さ位置H3に固定的に設置されるとともに塗装用ロボット20と作業範囲がオーバーラップ可能なように構成され、コンベア10による車体120の搬送動作に追従するように姿勢を変化させて車体120のドア121の開閉およびドア開放状態の保持を行うドア開閉用ロボット30とを備える。
(もっと読む)
テープ貼着方法及びテープ貼着装置
【課題】ハンド部で被着体の貼着位置にテープの仮止め貼着及び本貼着を実現する。
【解決手段】テープ8のタブ部分81をハンド部12で把持して、テープ裏面の貼着面8Aを被着体9の貼着位置90に貼着するテープ貼着装置1であって、先端部82の貼着面を貼着開始位置91付近に当接して先端部位82Aの貼着面8Aを仮止め貼着する姿勢位置P3、先端部位82Aの貼着面8Aを仮止め貼着したまま、先端部位82Aとタブ部分81との間の中間部位83のテープ表面を内側に中間部位83を折り曲げて、タブ部分81と中間部位83との間で弾性変曲したテープ表面の変曲部Xで先端部位82Aのテープ表面を押圧する姿勢位置P5及び、変曲部Xがテープ表面上を押圧しながら移動してテープ裏面の貼着面8Aを貼着位置90に順次本貼着する位置を記憶した記憶部4と、記憶部4に記憶された各位置に基づき、ハンド部12を制御する制御部5とを有する。
(もっと読む)
弾性部材の変形速度演算装置および変形速度演算方法ならびに駆動装置
【課題】弾性部材を介して駆動源で部材を駆動する場合において、変形速度を高い安定性で、かつ高い応答性で得る。
【解決手段】駆動源2の弾性部材4に動力を入力する入力側端部5における速度である駆動源速度Vdを取得し、弾性部材の弾性変形量Peを量子化された値として取得し、異なる時刻に取得した複数の弾性変形量Peの値に基づき、弾性変形量Peの変化率を、量子化に基づく値の急変を均した値である近似変化率Veとして演算する。そして、駆動源速度Vdと近似変化率Veとに基づき、係数Aを入力側端部の位置の時間的変化の周波数が高いほど大きくなる係数、係数Bを入力側端部の位置の時間的変化の周波数が低いほど大きくなる係数であるとして、弾性部材の変形速度Vを、V=A・(−Vd)+B・Veにより演算する。
(もっと読む)
マニピュレータ及びその経路生成方法
【課題】 ロボットマニピュレータが物体をつかむ過程で物体と衝突することなく目標位置へと移動できる最短経路を実時間で生成する方法を提案する。
【解決手段】 作業対象物体とグリッパを球形に模型化してグリッパの現在位置、物体の位置及びグリッパの目標位置を測定し、グリッパの現在位置、物体の位置及びグリッパの目標位置からなる三角形の夾角(Φ)を求めて、グリッパの移動すべき2次元平面上の円弧経路を計算し、グリッパの現在位置、物体の位置及びグリッパの目標位置からなる変換行列を求めて、2次元平面上の円弧経路を3次元空間上の経路に変換することによって、マニピュレータが物体と衝突することなく物体を把持できる最短経路を自動で生成し、結果として安全な作業経路及び作業時間の短縮を実現することができる。
(もっと読む)
51 - 60 / 964
[ Back to top ]