
国際特許分類[B25J13/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176)
国際特許分類[B25J13/00]の下位に属する分類
手でつかむ制御装置 (68)
足で操作する制御装置 (2)
制御台,例.コンソール,スウィッチ板 (73)
センサー手段,例.視覚または触覚装置,によるもの (1,069)
国際特許分類[B25J13/00]に分類される特許
71 - 80 / 964
ピッキングシステム
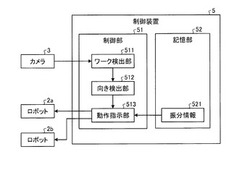
【課題】作業効率の向上を図ること。
【解決手段】カメラ3が、コンベアの搬送路上を撮像し、制御装置5が、カメラ3によって撮像された画像に基づいて搬送路上のワークを検出するとともに、検出したワークの保持動作をロボット2a,2bに対して指示し、ロボット2a,2bが、制御装置5からの指示に従って保持動作および移動動作を行う。特に、制御装置5は、カメラ3によって撮像された画像に基づいてワークの向きを検出し、検出したワークの向きに対応するロボット2a,2bに対してかかるワークの保持動作を指示する。
(もっと読む)
ロボット制御システム、ロボットシステム

【課題】制御ハードウェアーへの性能要求を低減できると共に応答性の改善も図れるロボット制御システム、ロボットシステム等の提供。
【解決手段】ロボット制御システムは、ロボット100のフィードバック制御の目標値を出力する目標値出力部60と、力覚センサー10からのセンサー情報に基づいて力制御を行い、目標値の補正値を出力する力制御部20と、補正値により補正された目標値に基づいて、ロボットのフィードバック制御を行うロボット制御部80を含む。力制御部20は、ロボットの姿勢に応じて変化する制御パラメーターを事前計算する事前計算部22と、センサー情報と制御パラメーターとに基づき補正値を求める演算処理を実行する実行部26を含む。
(もっと読む)
搬送ロボットシステム
【課題】外部制御装置と搬送ロボットとの間のハンドシェイクの回数を削減し、外部制御装置が複雑な処理を行わなくても済むようにし、搬送の全体の処理時間も短縮する。
【解決手段】搬送ロボットシステムは、外部制御装置から現時点の装置の状態、つまりカセットのランクの割付やランク情報、未検査品の有り無しといった情報を受け取り、そのデータに基づいて自身が次に実行すべき動作を判断し動作する。これによって、外部制御装置が逐一与えていたコマンドや動作のスケジューリングの演算を搬送ロボット自体に行わせ、自分自身で判断し動作を実行することができるので、外部の制御装置から一つ一つ動作の指令を受けなくとも、特定の情報を取得するだけで、自動で動作を行うことができる。
(もっと読む)
歩行状態推定装置及びこれを用いた歩行補助装置
【課題】人間の左右の身体動作の非対称性の程度によらず、当該人間の歩行状態を高精度で推定しうる装置等を提供する。
【解決手段】人間の左右の股関節角度又は肩関節角度の「差分」がサンプリングされることにより波形信号(差分振動子)が得られる。また、この波形信号からパワースペクトルが得られる。このため、人間の左右の身体動作の非対称度の高低によらず、パワースペクトルにおける閾値以上の高さを有する、最低周波数帯域に位置する単一のピークの位置を表わす基本周波数f0を参照するという一定の基準にしたがって、当該人間の歩行状態が高精度で推定されうる。
(もっと読む)
ロボット制御システム、ロボットシステム及びプログラム
【課題】 周辺装置の可動部に対して設定した侵入禁止領域に基づいてロボットの移動経路の生成を行うことで、ロボットのハンドから脱落した部品等が可動部に侵入することを抑止するロボット制御システム、ロボットシステム及びプログラム等を提供すること。
【解決手段】 ロボット制御システムは、処理部120と、記憶部110と、処理部120の処理結果に基づいてロボット30の制御を行うロボット制御部170とを含み、記憶部110は可動部を有する周辺装置の設計情報及び設置情報を記憶し、処理部120は周辺装置の設計情報及び設置情報に基づいて、周辺装置の可動部に対応付けて、ワークの侵入禁止領域を設定する侵入禁止領域設定部122と、設定された侵入禁止領域の情報に基づいて、ロボット30のアーム320のエンドポイントの経路情報を演算する経路演算部124とを含む。
(もっと読む)
歩行補助装置
【課題】人間の左右の運動形態の均等を図りながら、当該人間の歩行運動を補助することができる装置を提供する。
【解決手段】左股関節角度センサ202Lの出力の時間変化態様を表わす波形信号である左運動振動子φLと、右股関節角度センサ202Rの出力の時間変化態様を表わす波形信号である右運動振動子φRとの非対称度sが評価される。そして、非対称度sを低下させるように、左屈曲係数cL+、左伸展係数cL-、右屈曲係数cR+及び右伸展係数cR-のうち少なくとも1つの値が調節される。
(もっと読む)
ロボット及びその制御方法
【課題】 ロボットの重心と速度を合成して、キャプチャポイントを算出し、ロボットの歩行中にキャプチャポイントを制御することによって、安定的に歩行を制御するロボット及びその制御方法を提供する。
【解決手段】 本発明は、6自由度の一対の脚を有する2足ロボットに関する。また、人間の歩行と類似した動作で有限状態機械(FSM)を構成して、自然な歩行動作を可能にし、膝を曲げずに歩行させることで、大きな歩幅の歩行と効率的なエネルギーの使用を可能にする。
(もっと読む)
運動予測制御装置と方法
【課題】対象物(ワークやランドマーク)やロボット間の相対関係の計測結果(例えば位置、姿勢)に基づいて対象物やロボット間の相対運動を予測することができ、状態推定の計算量や、データの通信所要時間の影響を受けることなく、ロボットごとに決められた制御周期で制御指令値を算出し、ロボットを制御することができる運動予測制御装置。
【解決手段】(A)ロボット2の制御周期に依らない任意のタイミングで、計測装置12、状態推定装置14、及びデータ記憶装置16により、ワークやランドマーク、ロボット間の相対関係を計測し、ワークやランドマーク、ロボットの内部状態を予測し、予測した内部状態と予測に用いた状態遷移方程式に更新して記憶し、(B)ロボット制御装置20により、データ記憶装置16に記憶された最新の内部状態に基づき、ロボット2の制御周期で、その制御に必要な予測値を予測し、ロボット2をリアルタイムに制御する。
(もっと読む)
ロボット制御装置およびロボットシステム
【課題】冗長自由度を有するマニピュレータを適切に制御すること。
【解決手段】角度計算部21aが、目標位置に基づいて各アクチュエータ11a〜17aの角度を計算し、位置修正部21bが、角度計算部21aによって計算された各アクチュエータ11a〜17aの角度から特定されるマニピュレータ1の各部位の位置のうち何れかが禁止領域に含まれる場合に、禁止領域に含まれる部位の位置を禁止領域外の位置へ修正し、再計算部21cが、位置修正部21bによって修正された部位の位置に基づいて各アクチュエータ11a〜17aの角度を再計算する。
(もっと読む)
駆動軸共有装置および駆動軸共有方法
【課題】専用の制御装置を用いることなく、1つの共有駆動軸を複数の制御装置によって駆動制御することができ、構造が簡単であるとともに、低コストで実現することが可能な、駆動軸共有装置および駆動軸共有方法を提供する。
【解決手段】駆動軸共有装置10は、共有駆動軸20と、共有駆動軸20に連結され、共有駆動軸20を駆動する第1の駆動装置31および第2の駆動装置32とを備えている。第1の駆動装置31および第2の駆動装置32は、第1の制御装置40および第2の制御装置50によってそれぞれ制御される。第1の制御装置40は、第2の駆動装置32によって共有駆動軸20が駆動されていないとき、第1の駆動装置31により共有駆動軸20を排他的に駆動する。第2の制御装置50は、第1の駆動装置31によって共有駆動軸20が駆動されていないとき、第2の駆動装置32により共有駆動軸20を排他的に駆動する。
(もっと読む)
71 - 80 / 964
[ Back to top ]