
国際特許分類[B25J13/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176)
国際特許分類[B25J13/00]の下位に属する分類
手でつかむ制御装置 (68)
足で操作する制御装置 (2)
制御台,例.コンソール,スウィッチ板 (73)
センサー手段,例.視覚または触覚装置,によるもの (1,069)
国際特許分類[B25J13/00]に分類される特許
81 - 90 / 964
学習制御機能を備えたスポット溶接ロボット
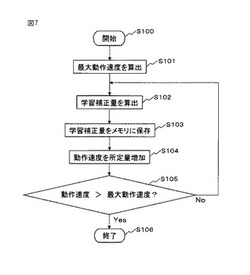
【課題】従来のスポット溶接ロボットは、ロボットの高速動作によって発生する軌跡誤差や振動成分によって、ロボットの最適動作が阻害されるという問題があった。
【解決手段】本発明のスポット溶接ロボットは、制御対象部位とセンサとを備えたロボット機構部(1)と、制御対象部位の目標軌跡または目標位置に関する位置指令データを取得し、位置偏差データに従って、ロボット機構部を所定の動作速度で動作させる動作制御部(4)と、センサの検出結果から制御対象部位の軌跡または位置を算出し、軌跡誤差または位置誤差を補正するための、もしくは振動を抑制するための、学習補正量を算出する学習制御部(3)と、を有し、動作制御部は、学習補正量を用いて位置偏差データを補正し、学習制御部は、学習補正量を算出する過程で、最大動作速度に至るまで1回又は複数回に渡って動作速度を増加させながら学習補正量を算出する、ことを特徴とする。
(もっと読む)
ロボット装置の制御システム

【課題】制御軸の仕様制限を超えた軸数をもつロボット装置を1台のロボットコントローラで制御するシステムを容易に構築できるようにする。
【解決手段】関節リンク機構を構成する一つの関節が一つの仮想上のモータで駆動される概念上の関節軸の組み合わせから構成される仮想ロボットを複数種類定義した運動制御処理系を有するロボット制御装置には、ロボットを任意に組み合わせて構成され、前記仮想ロボットに属するロボット群の中から任意のロボットを選択するロボット選択命令と、目標位置の指令を仮想ロボットの有する各関節軸に与えるロボット動作命令とを解析し、選択されたロボットの属する仮想ロボットの各関節軸に目標位置を与えるプログラム解析部と、ロボット選択命令に基づいて選択されたロボットについて、関節軸にそれぞれ対応している各サーボドライバに、目標位置を指令するプログラム指令部と、を有している。
(もっと読む)
生産システム
【課題】ワークに複数の作業面が存在する場合に、ワークを安定して支持して、ロボットアームの変位を効果的に抑制し、ワークを高精度に位置決めすることができる生産システムを提供する。
【解決手段】生産システムは、ロボットアーム20の先端に設けられ、ワーク50を保持するハンド30と、ワーク50に対して作業を施す作業装置とを備えている。また、生産システムは、ロボットアーム20の作業領域内に配置され、ハンド30を支持する支持面60a,60bを有する支持台60を備えている。ハンド30には、ワーク50を保持した際にワーク50に接触する面とは反対側であってワーク50の各作業面50a〜50cに平行となる被支持面30a〜30cが形成されている。ロボットアーム20は、ハンド30の複数の被支持面30a〜30cのうち、作業装置により作業が施されるワーク50の作業面に平行な被支持面を、支持台60の支持面に押し付ける。
(もっと読む)
マルチロボットシステムのデッドロックを自動的に防止する方法及びシステム
【課題】複数のロボットを含むワークセルにおける衝突及びデッドロックの回避を制御するシステム及び方法は、起こりうるデッドロック状態を自動的に決定し、起こりうるデッドロック状態を回避する方法を確定する。
【解決手段】デッドロック状態は、起こりうるデッドロック状態を有する動作を実行する前にデッドロックフリー動作状態を決定することによって除外される。デッドロックフリー動作ステートメントの決定を、オフラインで、通常の実行とは別に又は通常の製造の実行中に行うことができる。十分なCPU処理時間を利用できる場合、通常の製造の実行中の決定は、I/Oタイミングの変化又は外部イベント若しくはシーケンスのタイミングの変化のような動的な条件に応答するのに最大の適応性を与える。最小のCPUの影響に対して、決定はオフラインで行われ、この場合、プログラムシーケンスの多数の順列を分析することができ、最適化された実行のシーケンスを見つけることができる。
(もっと読む)
ロボット制御システム、ロボットシステム及びプログラム
【課題】 エラー処理動作の記述に用いられる命令として、通常動作の記述に用いられる命令と同じ命令体系を用いることで、容易且つ柔軟にエラー処理を記述可能なロボット制御システム、ロボットシステム及びプログラム等を提供すること。
【解決手段】 ロボット制御システムは1又は複数の命令により記述されるシーケンス命令を記憶する記憶部110と、シーケンス命令の実行処理を行う実行部122を有する処理部120と、処理部120の処理結果に基づいてロボットの制御を行うロボット制御部(ロボット制御装置50)を含み、記憶部110は通常動作シーケンス命令と、通常動作シーケンス命令と同じ命令体系の複数のエラー処理動作シーケンス命令を記憶し、実行部122は通常動作時に通常動作シーケンス命令を実行し、エラー発生時にエラー状況に応じたエラー処理動作シーケンス命令を実行する。
(もっと読む)
ロボットコントローラー、簡易設置型ロボット、及び簡易設置型ロボットの制御方法
【課題】移動装置に搭載されたロボットの動作速度を該ロボットの設置された状況に応じて変更することの可能なロボットコントローラー、該ロボットコントローラーとロボットとが移動装置に搭載された簡易設置型ロボット、及び簡易設置型ロボットの制御方法を提供する。
【解決手段】ロボット20は、ロボット20の振動を検出する角速度センサー38を備えている。制御装置21は、ロボット20に試行動作を実行させ、試行動作中における角速度センサー38の計測結果を振動情報として取得するとともに、その取得した振動情報をデータベース53に記憶されているメーカー評価情報71に基づいて解析する。メーカー評価情報71には、振動情報と該振動情報が計測されるロボット20の設置状況に適した動作速度とが関連付けられている。そして、振動情報の解析結果に基づいて選択された動作速度でロボット20を動作させる。
(もっと読む)
コミュニケーションロボット
【構成】 コミュニケーションロボット10は、CPU(80)を含み、道案内などのサービスを提供する。CPU(80)は、案内するユーザの知識量、当該ユーザがロボット10の合成音声を聞いた経験の有無、案内時の移動の有無、および案内時のジェスチャの有無に応じて、合成音声の発話速度を決定する。
【効果】 ユーザの知識や能力および案内する状況に応じて適切な発話速度を決定することにより、ユーザにとって心地よい発話速度でサービスを提供することができる。
(もっと読む)
選果システム
【課題】移送装置による載置台からトレイへの青果物の移送能率の低下を極力抑制するとともに、載置台からトレイへ青果物を移送する際に移送装置の吸着部に吸着された青果物が当該吸着部から落下することを抑制することができる選果システムを提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を吸着部66で吸着してトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6をトレイに詰める、選果システム1であって、移送装置60は、青果物6を吸着した状態で吸着部66が上方へ移動するときの平均速度、または、青果物6を吸着した状態で吸着部66が下方へ移動するときの平均速度が、青果物6を吸着した状態で吸着部66が水平方向へ移動するときの平均速度に比べて遅い速度となるように構成される。
(もっと読む)
溶接ロボットシステム及び可搬式教示操作装置
【課題】
溶接時の施工条件と、この条件で得られた溶接ビードの外観検査の分析結果とを容易にデータベース化することができない。
【解決手段】
ティーチペンダント10は溶接ロボットRの溶接により形成された溶接ビードを撮像し、画像を取得する撮像装置30、画像を表示するディスプレイ17、ティーチペンダント10の測定点から溶接ビードの幅方向の両側縁までの距離を取得する測距センサ37と、測距センサ37が取得した距離を使用して溶接ビード幅を算出する溶接ビード幅演算部25を備える。コントローラ40のハードディスク44は、溶接の施工条件を含む作業プログラムを記憶するとともに作業プログラムに従って溶接ロボットRが施工した溶接ビードの施工条件と、溶接ビード幅を関連付けしてデータベースとして記憶する。
(もっと読む)
ロボット群制御装置および方法
【課題】所定エリア内の各ロボットが個別に作業を実行するロボット群システムにおけるロボットの一斉停止を安全に行うこと。
【解決手段】各ロボット100の動作状態及び周囲状態の少なくとも一方を示す状態情報に応じて設定された複数種類のロボット停止手順を格納する停止手順データベース32を準備し、停止指令部34により停止指令が発せられたときに、各ロボット100について状態情報検出部30によって検出される状態情報に基づいて停止手順データベース32からロボット停止手順を選択し、各ロボット100について選択されたロボット停止手順を停止手順指令部38によって実行させる。
(もっと読む)
81 - 90 / 964
[ Back to top ]