
国際特許分類[B25J13/06]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176) | 制御台,例.コンソール,スウィッチ板 (73)
国際特許分類[B25J13/06]に分類される特許
1 - 10 / 73
産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動するサーボモータ駆動装置
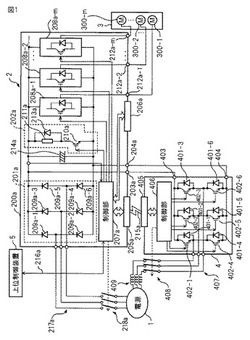
【課題】電源回生機能を産業用ロボットの操作条件に応じて追加することができるサーボモータ駆動装置を提供する。
【解決手段】サーボモータ駆動装置2は、ダイオード209a−1,209a−2,209a−3,209a−4,209a−5,209a−6を有するコンバータ201aと、産業用ロボット3の可動部の回転軸に接続されたサーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを、NPN型トランジスタ210aがオン状態であるときに消費する回生抵抗211aを有する回生抵抗回路202aと、回生エネルギーを三相交流電源1側に回生するコンバータ4を着脱自在に接続するコネクタ203a,204a及び多ピンコネクタ205aと、を有する。
(もっと読む)
生産機器用の制御装置及びその製造方法

【課題】制御装置の小型化にあたり、制御装置の筐体に基板を容易に取り付け可能とするとともに、基板の振動の発生を抑制する。
【解決手段】生産機器用の制御装置200は、筐体205と、基板250と、固定具260とを備える。基板250は、ギャップ230を挟んでそれぞれ配置された第1の回路および第2の回路と、ギャップ230に形成されたスリット240と、を有する。固定具260は、このスリット240に取り付けられる。基板250は、スリット240に取り付けられた固定具260を介して筐体205に固定される。
(もっと読む)
タッチパネル式入力装置及びタッチパネル式入力装置の画面表示方法
【課題】誤った入力に基づいて、コントローラに操作情報が出力されることを防止できるタッチパネル式入力装置を提供する。
【解決手段】ティーチングペンダント3が備える表示部11の表示領域に選択ボタン表示領域22と確認メッセージ表示領域24とを分割配置し、確認メッセージ表示領域24を画面の上辺に沿うように寄せて配置し、選択ボタン表示領域22を画面の右辺に沿うように寄せて配置する。選択段階では、複数の選択ボタン21を選択ボタン表示領域22に表示させ、確定段階では、選択された候補を操作者に確認させるメッセージ23を確認メッセージ表示領域24に表示させると共に、確定入力を行うための確定ボタン26を選択ボタン表示領域22外の余白スペース25に配置する。更に、選択段階から確定段階に移行する際に複数の選択ボタン21の画像を消去する。
(もっと読む)
ロボットコントローラー
【課題】筐体内に配置される回路基板の内部構造を簡素化することの可能なロボットコントローラーを提供することにある。
【解決手段】交流電圧を直流電圧に変換して出力する駆動電圧生成基板20と、駆動電圧生成基板の出力を多相交流電圧に変換してロボットのモーターに出力する駆動基板40と、駆動基板40の出力をモーターの回転位置に基づいて制御するための制御信号を駆動基板40に出力する制御基板30とを備え、制御基板30が、箱体形状をなす筐体内の底面に沿って該底面に配置され、駆動電圧生成基板20が、制御基板30よりも小さく、且つ制御基板30上に積層され、駆動基板40が、駆動電圧生成基板20と制御基板30とに対して立てられた状態で、制御基板30の上面のうち駆動電圧生成基板20で覆われていない部分と駆動電圧生成基板の上面とに架設されている。
(もっと読む)
ロボットのコントローラ
【課題】電源からロボット用電源とコントローラ用電源とを分岐して供給する構成のロボットシステムで、大電流を流すサーキットプロテクタを設けない構成とする。
【解決手段】交流電源ACからロボット本体1側にはコンタクタ5を介して給電し、コントローラ20側には直接整流回路10に給電している。コントローラ20は、コントローラCPU9、スイッチングIC16、遅延回路37、電源スイッチ20aなどから構成される。電源スイッチ20aがオンされると、コントローラCPU9が給電されてコンタクタ5をオンさせ、ロボット本体1を駆動制御する。電源スイッチ20aがオフされると、コントローラCPU9はロボット本体1の停止動作を行い、コンタクタ5をオフさせ、遅延時間をおいてトランジスタ35がオフされると、自身の給電が停止する。
(もっと読む)
ロボットコントローラー
【課題】拡張回路基板とその接続先となる制御回路基板との接続構造の複雑化を抑えつつ、ロボットコントローラーが制御回路基板の面方向に大きくなることを抑えることの可能なロボットコントローラーを提供する。
【解決手段】制御回路基板30に対して立てられた状態で制御回路基板30に連結され、第2外部装置からの入力信号を制御回路基板30に入力する拡張回路基板40と、拡張回路基板40の周縁のうちで筐体の正面壁1Fと向い合う第2接続縁40Fに配設され、正面壁1Fを貫通して第2外部装置に接続される拡張I/Oコネクター19とを備え、拡張回路基板40は、LANコネクター16の上側に配置され、該LANコネクター16との接触を避ける切り欠き42を有する。
(もっと読む)
ロボットコントローラー
【課題】筐体内に配置される回路基板の内部構造を簡素化することの可能なロボットコントローラーを提供することにある。
【解決手段】交流モーターが搭載されたロボットを制御するロボットコントローラーであって、交流電圧の出力電圧を直流電圧である駆動電圧に変換して出力する駆動電圧生成基板20と、駆動電圧生成基板20の出力電圧を多相交流電圧に変換して交流モーターに出力する駆動回路基板40と、駆動回路基板40の出力電圧を交流モーターの回転位置に基づいて制御するための制御信号を駆動回路基板40に出力する制御回路基板30とを備え、駆動電圧生成基板20と制御回路基板30とが、筐体内の底面パネルに互いに並んで配置され、駆動回路基板40が、駆動電圧生成基板20と制御回路基板30とに対して立てられた状態で駆動電圧生成基板20と制御回路基板30とに架設されている。
(もっと読む)
ロボットコントローラー
【課題】スロットから引き抜き可能に挿着されたカード型記憶媒体が該スロットから抜け落ちることを抑えることの可能なロボットコントローラーを提供する。
【解決手段】制御回路基板30の実装面におけるカード型記憶媒体34の周囲のうちカード型記憶媒体34の引き抜き方向である背面方向に形成されて制御回路基板30を貫通するスロット用貫通孔37と、筐体の一側面である底面パネル1Bに形成されてスロット用貫通孔37と向い合う第1被螺合部としてのスロット用スタッド36と、制御回路基板30の実装面から突出するとともにスロット用貫通孔37を介してスロット用スタッド36と螺合する落脱抑制ネジ38とを備える。
(もっと読む)
ロボットコントローラー
【課題】パワーデバイスの冷却に用いられるヒートシンクの種別が増えることを抑えつつ、ロボットコントローラーの小型化を図ることの可能なロボットコントローラーを提供する。
【解決手段】複数の交流モーターを有したロボットの動きを複数の交流モーターの各々の駆動によって制御するロボットコントローラーであって、直流電圧を多相交流電圧に変換して交流モーターに出力する複数のパワーデバイス43B,43Fと、パワーデバイス43B,43Fが実装される複数のモータードライバー基板40とを備え、複数のモータードライバー基板40の各々は、1つのヒートシンク44と、1つのヒートシンク44に取り付けられた2つのパワーデバイス43B,43Fとを備える。
(もっと読む)
ロボット制御装置
【課題】装置本体に付随する教示装置およびケーブルの取り出し作業および収納作業が煩雑になることを抑制することが可能なロボット制御装置を提供する。
【解決手段】このロボット制御装置100は、ロボット90に対して動作を教示するプログラミングペンダント(教示装置)30と、プログラミングペンダント30に接続されるとともにロボット90に対して教示する動作の指令を伝送するケーブル40と、プログラミングペンダント30とケーブル40とを共に吊り下げた状態で保持する保持金具50とを備える。
(もっと読む)
1 - 10 / 73
[ Back to top ]