
国際特許分類[B25J15/04]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 把持部 (1,686) | ヘッドまたはヘッド部品を遠隔分離または遠隔交換するための装置をもつもの (109)
国際特許分類[B25J15/04]に分類される特許
1 - 10 / 109
ロボットハンド及びフィンガー交換装置
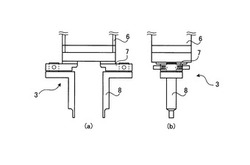
【課題】多種の部品を把持可能で拡張性が高いロボットハンド及びこのロボットハンドにフィンガーを着脱するフィンガー交換装置を得ること。
【解決手段】ロボットアームに設置され、一対のフィンガー8で把持対象物を挟んで把持するロボットハンド3であって、ロボットアームに固定されるハンド本体6と、ハンド本体6に固定され、一対のフィンガー8の各々をフィンガー8と独立して着脱可能としたフィンガーベース7とを備える。
(もっと読む)
ロボットハンドおよびロボットハンドシステム

【課題】簡単な構造でハンド先端部の取り外しを行う。
【解決手段】ハンド先端部4をハンド本体部3から取り外す際には、治具8の治具ピン83が、ハンド先端部4の貫通孔42の下部開口から挿入されて着脱機構35のピストン352に当接する。その後、ハンド本体部3のエア溜まり311が大気開放され、圧縮エアによるピストン352への圧力が解放される。そして、治具8のバネ84の復元力により、治具ピン83がピストン352を押圧しつつ治具本体81から突出する方向へと移動する。これにより、複数のボール353が着脱凸部351の孔内部へと戻って貫通孔42との係合が解除される。その結果、ハンド本体部3とハンド先端部4との固定が解除される。このように、ロボットハンド2では、簡単な構造でハンド先端部4の取り外しを行うことができるため、組立ロボットの製造コストを低減することができる。
(もっと読む)
ロボットハンド用交換爪モジュール
【課題】ロボットハンドのハンド本体に装備された指部材に着脱可能に装着されるロボットハンド用交換爪モジュールを提供すること。
【解決手段】指部材3を有するロボットハンド1に、指部材3に着脱可能で且つ指部材3の開閉動作に連動して開閉される爪部材13を備えた交換爪モジュール5を着脱可能に装着する。交換爪モジュール5は、指部材3を挿入可能な挿入孔12dを備え且つ爪部材13が装備された爪支持部材12、爪支持部材12を対応する指部材3の開閉方向へ移動可能に案内する案内機構15、案内機構15を介して爪支持部材12を支持するフレーム部材11等を備えている。
(もっと読む)
医療用マニピュレータ
【課題】医療用マニピュレータにおいて、術具部の術具駆動部に対する着脱を容易かつ迅速に行うことができるようにする。
【解決手段】医療用マニピュレータ1は、連結端面2dに配置され、互いに逆向きに進退移動可能とされ、術具部4側に進出する際に進出方向に駆動力を伝達する第1入力部材11、第2入力部材13と、これら入力部材を進退させる直動変換部15、モータ16と、を有する術具駆動部2と、連結端面4dにおいて第1入力部材11に対向して進退移動可能に支持され第1入力部材11と同方向に移動し、他端部が作動体に接続された第1の伝達部材41と、連結端面2dにおいて第2入力部材13に対向して進退移動可能に支持され第2入力部材13と同方向に移動する第2の伝達部材43と、第1の伝達部材41および第2の伝達部材43に係合されたピニオン42と、を有する術具部4とを備える。
(もっと読む)
マルチアームロボット遠隔手術におけるツール状態および通信のためのインディケータ
【課題】マルチアームロボット遠隔手術におけるツール状態および通信のための好適なインディケータを提供すること。
【解決手段】医療用および/またはロボットのデバイス、システムおよび方法は、マルチアームの遠隔ロボットまたは遠隔手術システムの各マニプレータアセンブリ(8、10)に関連するインディケータ(20)を提供し得る。例示的なインディケータは、関連する手術器具(28)を動かすマニプレータに取り付けられたマルチカラーの発光ダイオード(LED)(56)を備え、インディケータが任意の種々様々な信号を表示することを可能にする。本発明は、遠隔手術システムおよび/または遠隔手術チームのメンバー(A、O)の間の通信を容易にする追加のユーザインタフェースを提供し得る。
(もっと読む)
ロボットハンド
【課題】メンテナンス作業の効率が向上するロボットハンドを提供する。
【解決手段】フィンガー10と、フィンガー10を駆動する電動モータ14,15と、電動モータ14,15の動作を制御するモータドライバ16と、フィンガー10を支持するフィンガーベース13と、が一体にモジュール化されている。フィンガーベース13は、ハンドベース101の取付部102に着脱可能に取り付けられる。ハンドベース101には、動作指令を出力する電源モジュール104が設けられている。モータドライバ16は、電源モジュール104にコネクタ接続される。
(もっと読む)
自動工具交換装置
【課題】自動工具交換装置の連結部に生じるギャップを抑制することで、各種作業を精度良く行うことができる自動工具交換装置を提供する。
【解決手段】自動工具交換装置1は、一端部4aに形成された突起部40において、突起部40の内部から外部に突出可能なカム機構46が設けられ、他端部4bにおいてカム機構46を駆動させるための駆動力を発生可能な操作部が着脱可能に取り付けられる雄型部材4と、一端部5aにおいて、各工具が交換可能に取り付けられるとともに、突起部40を挿入可能な孔50と、孔50に挿入された突起部40のカム機構46の回動に応じて、カム機構46と係合する係合部51bとを有する雌型部材5とを備える。
(もっと読む)
ハンドおよびロボット
【課題】異なる大きさや形状のワークを把持すること。
【解決手段】互いに接近する向きあるいは遠ざかる向きにスライドする1組のスライド部と、かかるスライド部のそれぞれに固定される支持部と、少なくとも1つの支持部の先端部に取り付けられ、上記のスライド部のスライド軸と平行な回転軸まわりに回転する回転部と、上記の回転軸と直交し、かつ、それぞれ異なる向きに取り付けられる複数の把持爪とを備え、上記の1組のスライド部は、互いに平行な上記のスライド軸に沿ってそれぞれスライドするようにハンドおよびロボットを構成する。
(もっと読む)
ロボットハンド及びロボット
【課題】小さな対象物であっても安定して把持することが可能なロボットハンドを提供する。
【解決手段】複数の指部の間に掌部が設けられて、指部で対象物を把持した状態で対象物に掌部を当接させるロボットハンドにおいて、掌部の代わりに対象物に当接する当接部材を掌部に着脱可能に取り付けることとする。こうすれば、掌部を当接させることができないような小さな対象物でも、指部で把持した対象物に対して当接部材を当接させることができるので、小さな対象物を安定して把持することが可能となる。
(もっと読む)
継手
【課題】連結のために特別な動力手段を設けることなく、接続した工具などの部品の落下を防止することができる継手を提供すること。
【解決手段】本発明の一態様は、ロボット10に工具を接続するアダプタ14において、テーパシャンク部42と突出部44とを備えるオスアダプタ36と、テーパ孔部62と拡径部64と端面部66とを備えるメスアダプタ38と、を有し、突出部44が拡径部64の内部に配置され、かつ、テーパシャンク部42の径方向について突出部44が端面部66と重なり合っている場合に、オスアダプタ36をメスアダプタ38に向かって移動させることにより、テーパシャンク部42とテーパ孔部62とが嵌まり合ったクランプ状態が設定されること、を特徴とする。
(もっと読む)
1 - 10 / 109
[ Back to top ]