
国際特許分類[B25J17/02]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 接続部 (479) | 手首ジョイント (167)
国際特許分類[B25J17/02]に分類される特許
1 - 10 / 167
ワーク把持装置
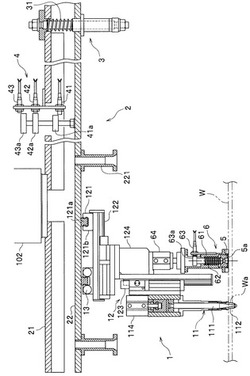
【課題】種々のワークに対応でき、軽量化に適している把持装置を提供する。
【解決手段】ロボットアームに装着して種々のワークWを搬送するためのワーク把持装置1であって、ロボットアームに連結する支持プレート22と、支持プレート22に配設されワークWの被把持部Waを把持する把持機構11と、把持機構11を自在移動可能に支持する自在移動機構12と、把持機構11の移動を規制する移動規制装置13と、を備え、把持機構11は凹部からなる被把持部Waを内側から把持するインナータイプ、または凸部からなる被把持部Waを外側から把持するアウタータイプで構成する。
(もっと読む)
塗装用ロボットシステムおよびスプレーガンユニット

【課題】スプレーガン同士の間隔を簡単に変更することが可能な塗装用ロボットシステムを提供する。
【解決手段】塗装用ロボットシステム10は、複数のロボットアーム22〜24を有するとともに、先端のロボットアーム24に、先端駆動軸J5を中心に回動する駆動軸部材25が設けられたロボット20と、ロボットアーム24に取り付けられたスプレーガンユニット30とを備えている。スプレーガンユニット30は、ロボットアーム24に固定された支持部材31と、支持部材31に設けられたガイド部材40a、40bと、支持部材31に設けられた複数のスプレーガン32、33a〜33cと、移動スプレーガン33a〜33cと駆動軸部材25とを連結するリンク機構50とを有している。ロボット20の駆動軸部材25が回動することにより、リンク機構50を介して複数のスプレーガン32、33a〜33c同士の間隔を変更可能である。
(もっと読む)
ロボットの手首装置
【課題】ロボットの手を駆動させるための配線や配管の長さを短縮するとともに、当該配線または配管の破損等を防止することができるロボットの手首装置を提供する。
【解決手段】下腕部10の先端側に設けられた手首部20を備え、先端に手部30が接続されるロボットの手首装置1であって、手首部20が、第1軸を中心に回転駆動する第1駆動源21と、第1駆動源21の回転駆動に合わせて回動する第1フレーム22と、中空部25aを有する力覚センサ25と、中空部25a内に配置され、一端側に第1開口部26aを有し、他端側に第2開口部26bを有し、配線・配管WPが配設される筒状の配線・配管支持部材26とを備え、配線または配管WPが、第1駆動源21の周囲の外径に沿って取り回しされ、配線・配管支持部材26の第1開口部26aおよび第2開口部26bに結束部材29を介して係止されている。
(もっと読む)
産業用ロボットの手首構造、及びその組付け方法
【課題】 第2連結部材の外周部に形成される孔の中に溜まる異物を低減し、且つ第2連結部材の外周部の清掃を容易にすることができる産業用ロボットの手首構造を提供する。
【解決手段】 手首構造1は、筒状の第1連結部材11及び第2連結体12と、関節体15とを備えている。関節体15は、第1連結部材11の一方の開口端部11eに固定される外側環状部材21と、その内側に回動可能に設けられた内側管状部材22を有している。また、内側環状部材22及び前記第2連結部材12には、内側環状部材22から第2連結部材12まで達する有底の第1通し孔28が形成され、この第1通し孔28には、ボルト29が内側環状部材22側から通されている。関節体15の内側環状部材22は、このボルト29によって内側環状部材12と締結されている。
(もっと読む)
ピックアップユニット
【課題】小型化が容易で起動時、停止時の慣性が小さく、ピックアップ作動を高速に、かつ、正確に行え、作動が俊敏なピックアップユニットの提供。
【解決手段】機体23に設定した1本の主軸線26に沿ってスライド軸24と円筒溝カム25を配置する。スライド軸24は上下方向で移動可能であり下端部に吸着ノズル27を備える。スライド軸24と円筒溝カム25とが、円筒溝カム25に案内されるカムフォロア36を有するジョイント部35により結合される。カムフォロア36は円筒溝カム25の周面に設けたカム溝32に一端が案内されると共に、他端が前記機体23に主軸線方向へ設けた直線ガイド孔40に案内されている。
(もっと読む)
関節機構および作業アタッチメント
【課題】簡易な構成でエンドエフェクタの姿勢の自由度を拡大する。
【解決手段】エンドエフェクタ60を支持する支持部30と、支持部を第1軸線(x軸)回りに回動可能に支持する第1フレーム10と、第1フレーム10を第1軸線に直交する第2軸線(y軸)回りに回動可能に支持する第2フレーム20とを備えた関節機構1である。第2フレーム20は、ロボットアーム70と着脱可能に結合する取付部210,220,230が、互いに異なる向きで複数設けられている。
(もっと読む)
手術用具のためのフレキシブルリスト
【課題】低侵襲手術器具を提供すること。
【解決手段】低侵襲手術器具は、作業端部、近接端部、及びこの作業端部と近接端部との間のシャフト軸とを有する細長いシャフト(14)、及びエンドエフェクタ(12)とを含む。リスト部材(10)は、壁に囲まれた内部を通って延びる軸を含むフレキシブルチューブ(26)を有する。このフレキシブルチューブの壁は、フレキシブルチューブの軸に平行するように方向付けられた複数の内腔を含む。リスト部材(10)は、細長いシャフトの作業端部に接続される近接部分と、エンドエフェクタ(12)に接続される遠位部分とを有する。複数の作動ケーブル(24)は、エンドエフェクタに接続される遠位部分を有する。
(もっと読む)
ロボットのエンドエフェクタのシール部材
【課題】エンドエフェクタが取り付けられているロボットにおいてエンドエフェクタを取り外すことなく、また、ボルトが障害になることなく取り付け可能であり、シール性が過度に低下することを抑制するシール部材を提供する。
【解決手段】シール部材は、半円環状に形成されて互いに係合することにより円環状をなす一対のリム部30を備えており、このリム部30は、一方の端部に第一係合部32が設けられ、他方の端部に第二係合部33が設けられ、第一係合部32および第二係合部33はそれぞれ他方のリム部30に設けられている第二係合部33および第一係合部32に係合し、裏面側に潤滑剤を吸着する吸着材31が設けられている。
(もっと読む)
ロボット
【課題】先端側のアームの揺動やエンドエフェクタの回転を行わせるために必要な部品点数を削減することによって製造コストを低減することができるロボットを提供すること。
【解決手段】実施形態の一態様に係るロボットは、モータとハイポイドギヤとを備える。モータは、ロボットアームの内部に設けられる。ハイポイドギヤは、モータの駆動力をロボットアームへ連結された先端側のアームへ伝達して先端側のアームの揺動またはエンドエフェクタの回転を行わせる。
(もっと読む)
アーム装置及び溶接ロボット
【課題】駆動軸の先端に備えたアームが、駆動軸の中心線と交叉する方向へ折り曲ることができ、且つ、アームの軸中心周りに回転できるようにする。
【解決手段】基部2に備えて一端を第1の駆動手段5に接続し他端に第1の駆動輪6を固定した第1の駆動軸4と、基部2に備えて一端を第2の駆動手段9に接続し他端に第2の駆動輪10を固定した第2の駆動軸8と、第1の駆動軸6の第1軸線S1と交叉する第2軸線S2周りに回動するよう基部2に支持した回動ブロック13と、回動ブロック13に固定して第2の駆動輪10と駆動係合する第2の従動輪14と、第2軸線S2周りに回動するよう回動ブロック13に支持され且つ第1の駆動輪6に駆動係合した中間輪17と、第2軸線S2と交叉するよう回動ブロック13に回転可能に支持したアームと、アームに固定して中間輪17に駆動係合する第1の従動輪20とを備える。
(もっと読む)
1 - 10 / 167
[ Back to top ]