
国際特許分類[B25J5/02]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 車または搬送体に設置されているマニプレータ (1,079) | ガイドウェイに沿って走行するもの (32)
国際特許分類[B25J5/02]の下位に属する分類
国際特許分類[B25J5/02]に分類される特許
1 - 10 / 31
人物監視システム、ロボット、人物監視方法およびロボット制御プログラム
【課題】監視対象者に対して正面側から話しかけることができ、かつ、監視対象者が建物の出入り口から出ることを防止することができる人物監視システム、ロボット、人物監視方法およびロボット制御プログラムを提供する。
【解決手段】所定エリア内に進入した移動物が監視対象者であるか否かを判定する人物判断手段21と、人物判断手段21が移動物が監視対象者であると判定した場合に、監視対象者の移動経路を推定し、推定した移動経路上に移動し、監視対象者の正面側から監視対象者に対して対話を実行するロボット30とを含む。
(もっと読む)
国の全額借金返済と都道府県市町村区の全額借金返済の為の多機能インプット全自動ロボットの著作権原本。コメント2008年8月30日AM1時16分11秒原本図面幾らかコピー取って眠る美馬牛カンキチ。2008年9月4日PM17時49分47秒多機能ロボット図面とロボット原本図を作り終えて、漸く再び書き始める美馬牛カンキチ。

【課題】従来のロボットは、全自動ロボットが無く、放射線処理など、危険作業には、向かないロボットしか無く、電気切れで止まってしまう欠点ばかりのロボットだけで有った。
【解決手段】人間の持ち得ている機能を、機械式にして、集合した無給式の超小型全自動発電ロボットの未来型ロボットに成り、危険な仕事を、従事する事によって、データー全自動インプットによって、ロボット知能の全自動進化によって、ロボットと人の共有社会を目指した著作権原本集合の人型ロボットの著作権原本。
(もっと読む)
搬送装置
【課題】 消費エネルギを最小化することのできる搬送装置を提供する。
【解決手段】 移動部2を駆動するためのアクチュエータ3と、軌道情報を生成する軌道情報生成部5と、アクチュエータを作動させるコントローラ4とを備える。軌道情報生成部は、アクチュエータにおける駆動エネルギを運動エネルギに変換するときのエネルギ変換効率に関する情報を記憶する効率情報記憶手段と、移動部が移動するときの特有の情報を記憶する特有情報記憶手段と、移動部の移動条件に関する情報を記憶する移動条件情報記憶手段と、移動部の運動特性に関する情報を記憶する運動特性情報記憶手段と、前記運動特性に基づき移動部の移動に要する駆動エネルギを算出する演算手段と、前記演算手段により算出されたエネルギをパラメータに含む評価関数の値が最小となる加速時、定速時および減速時の軌道情報を決定する軌道情報決定手段と備える。
(もっと読む)
塗装システム
【課題】例えば、車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。例えば、塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。
(もっと読む)
塗装システム
【課題】車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。このため、塗装ロボット14a〜14dとオープナーロボット16との間には、高低差が存在する。また、オープナーロボット16のアーム部40の先端には、柱状部の先端から互いに逆方向に分岐して延在する第1爪部及び第2爪部を有する略逆T字形状のフック48が設けられる。
(もっと読む)
真空搬送装置及び表示装置の製造方法
【課題】
ストロークの大きな真空搬送装置であっても、適時にその駆動系を覆う容器の内部を真空排気出来る基板搬送装置を提供することを本発明の課題とする。
【解決手段】
本発明の係わる真空搬送装置は、内部を排気し得る第一の容器、前記第一の容器内に位置する内部を排気し得る第二の容器、前記第二の容器を一の方向に並進移動をさせる運動手段、排気手段と連通/遮断をするバルブ及び第一の容器に設けられた中空部分を有する第一の接合部、前記第二の容器に設けられた前記第一の接続部に対向する中空柱状体の突出部並びに前記中空柱状体の突出部の内側を移動可能で、前記第一の接合部に前記運動手段により接合可能な中空柱状体の部分を有する第二の接続部を有する構成とする。
(もっと読む)
大型枠組構造物の溶接ロボット装置
【課題】パネル上にロンジとトランスが交差している大型の枠組構造物の交差部を本溶接することができ、本溶接が可能な溶接部位の制約が少なく、人手に頼る手溶接がほとんど不要であり、大型ガントリ構造による従来のマルチロボット溶接装置と比較して装置全体を小型化でき、複雑な制御システムが不要である大型枠組構造物の溶接ロボット装置を提供する。
【解決手段】1対のロンジ2と1又は1対のトランス3で囲まれた升目形状の枠内を溶接対象領域4とし、溶接対象領域4を跨いで大型枠組構造物に固定され溶接対象領域の上部に位置する水平支持架台12を有するロボット架台10と、水平支持架台12の下面に取付けられ升目形状枠内(溶接対象領域4)の全域にわたり溶接ヘッドを3次元的に数値制御して溶接可能な溶接ロボット20とを備える。
(もっと読む)
作業具の移動装置およびローダ装置
【課題】 共通の駆動源で作業具を2軸方向に移動可能で、構成が簡略な作業具の移動装置を提供する。
【解決手段】 移動装置1は、作業具2を、レール3に沿って移動させ、かつレール3と交差する方向に移動させる。走行用駆動源7,8を搭載し、レール3上を走行する第1および第2走行体4,5と、これら第1および第2走行体4,5の間に位置し、レール3上を走行する中央走行体6と、この中央走行体6にレール3方向と交差する方向に移動自在に設けられ、作業具2が取付けられる移動部材12とを備える。一端が第1走行体4に固定され、中間部が、中央走行体6に設けた第1案内点15、移動部材12に設けた中間案内点17、中央走行体6に設けた第2案内点16の順に巻き掛けられ、他端が第2走行体5に固定された巻掛体18を設ける。
(もっと読む)
カメラ・ブームを備えたテレプレゼンス・ロボット
モニタを支持するとともに移動プラットホームに結合されたヘッドを有する遠隔制御ロボットを開示する。移動ロボットは、ブームにより移動プラットホームに結合された補助カメラも含む。移動ロボットは、遠隔制御ステーションにより制御される。一例として、ロボットを手術室の周囲で遠隔的に動かすことができる。補助カメラがブームから延びて、室内の患者又はその他のアイテムを比較的近くで見られるようにする。手術室内の助手が、ブーム及びカメラを動かすこともできる。ブームをロボットヘッドに接続して、遠隔制御ステーションがこれを遠隔的に動かすことができる。 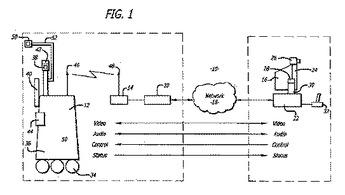 (もっと読む)
(もっと読む)
移動体搭載用のロボット及びこれを搭載した移動体
【課題】運転者を含めた全ての乗員が移動体内で快適に過ごすことができる移動体用のロボットを提供する。
【解決手段】移動体或いは乗員から受ける諸条件を認識する認識部12と、この認識部12により認識された前記諸条件に対応するための思考を行う思考部14と、前記移動体に沿って所定位置に移動するための移動部16と、思考部14による結果に基づき必要な動作を実行する動作部18とを含む、移動体搭載用のロボットにおいて、思考部14にはロボット自らが行動するための自律思考部が設定され、該自律思考部は前記認識部12が認識した前記諸条件に基づき前記移動部16及び動作部18を駆動させて自律制御を実行し、前記自律制御には、前記移動体から受ける該移動体の挙動に対して移動状態或いは停止状態のロボットの体勢を安定に保持できるように移動部16及び動作部18を駆動制御する自己保持モードを含み、自律性を備えて乗員に種々のサービスを提供する移動体用のロボット10である。
(もっと読む)
1 - 10 / 31
[ Back to top ]