
国際特許分類[B25J9/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513)
国際特許分類[B25J9/00]の下位に属する分類
腕の運動により特徴づけられるもの,例.直交座標型 (96)
多関節の腕により特徴づけられるもの (414)
モジュラー構造により特徴づけられるもの (31)
マニプレータ要素の位置決め手段に特徴のあるもの (394)
プログラム制御 (534)
国際特許分類[B25J9/00]に分類される特許
31 - 40 / 44
直交ロボットの軸用スライダ装置
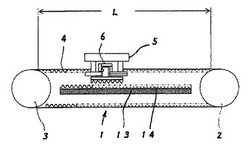
【課題】 ベルトが定められた張力以下になった場合はスライダに設けたブレーキによりその移動を停止し、装置の破損および安全性が保持できるベルトに取り付けたスライダを有する直交ロボットの軸用スライダ装置を提供することにある。
【解決手段】 駆動、従動の両プーリとの間に掛け渡したタイミングベルトに取り付けたスライダを往復移動させる直交ロボットの軸用スライダ装置において、走行方向に対して直角方向に切断し、この切断部の一側をスライダに固着されたブレーキフレームに取り付け、他側をブレーキフレームに摺動可能に配設されたブレーキロックに固着したタイミングベルトと、第1のバネによりブレーキロックに係脱し、第2のバネにより相手ブレーキ部材に係合するブレーキパッドを設けたパッド取付け部材とを有してなるブレーキを設けた直交ロボットの軸用スライダ装置とした。
(もっと読む)
ピックアンドプレース装置

【課題】ピックアンドプレース動作に伴う振動や騒音の発生を抑制し、ピック動作時及びプレース動作時の動作速度に起因する移載ミスを抑制する。
【解決手段】本発明のピックアンドプレース装置は、回転駆動源と、回転駆動源によって回転軸の周りに回転する回転体111と、回転体に一端側が連結されたリンク112と、リンクの他端側に連結され、回転体の回転に対応して所定の回動角範囲を往復回動する回動体113と、回動体の往復回動運動によって駆動され、回動体の回動角範囲の両端部がピック動作及びプレース動作に対応する態様で動作するピックアンドプレース機構とを具備し、回転体とリンクの連結点の回転経路111sは、上記回動角範囲の少なくともいずれか一方の端部に対応する連結点の位置を含む範囲において他の部分より曲率半径が増大し或いは直線状に構成された経路部分111s1、1111s2を有する。
(もっと読む)
ロボットシステム
【解決手段】ターンテーブルの回転軸から離れた位置にある軸を中心にして回転させることができるように、ターンテーブル上に軸回転可能に取り付けられているアームを有する、回転させることのできるターンテーブルを含んでいるロボットシステム。アームの回転軸は、ターンテーブルを基部上に支持する軸受よりも、ターンテーブルの回転軸の近くに配置されている。アームは、ターンテーブルの下方に位置する、アームの回転軸を横断する方向に伸張する部分を有している。ターンテーブルは、基部の上に、共通平面に位置する部分を有する単一の軸受によって支持されている。 (もっと読む)
先端工具案内装置及び先端工具案内装置の搬入方法
【課題】原子力発電設備の蒸気発生器の水室内に搬入されて、ショットピーニングヘッド等の先端工具を、必要領域に沿い案内する。
【解決手段】先端工具案内装置1000は、旋回支持部100と、スライドテーブル200と、マニプレータ300とで構成されている。旋回支持部100は、水室内にて自立・固定されると共に、連結されたスライドテーブル200を旋回する。スライドテーブル200はマニプレータ300を連結すると共に前後方向にスライド移動する。マニプレータ300は、先端にて先端工具を把持する。水室への搬入の際には、旋回支持部100と、スライドテーブル200と、マニプレータ300を切り離して、個別に搬入を行い、水室内にてこれらを組み立てて先端工具案内装置1000が構成される。
(もっと読む)
ピックアンドプレースユニット
【課題】2枚のカムを用いることによる位置決め精度及び繰返し精度を維持しながら、全ストロークの任意の2点間を、選択したモーション形態でピックアンドプレース作業を行うことができるPPUの提供。
【解決手段】エンドツールを取り付けるトッププレート11のx軸方向移動とz軸方向移動を、それぞれに対応した回転カム板のカム曲線で生成するピックアンドプレース装置であって、x軸用カム板3の駆動回転をx軸用ステッピングモーター23で行い、z軸用カム板4の駆動回転をz軸用ステッピングモーター20で行い、これら2つのモーターの回転量と回転タイミングを設定する制御装置44を備えたストローク可変のピックアンドプレースユニットとする。
(もっと読む)
単軸ロボット
【課題】単軸ロボットが大型化することなくスライダ動作時に単軸ロボットの収容部の空気が外部に漏れるのを防止することができる単軸ロボットを提供する。
【解決手段】一軸方向に延びるとともに上方に開口する収容部を有するケース部材2と、収容部から一部が上方に突出した状態で前記収容部に収容されるとともに、軸方向に移動可能に取り付けられた可動部材3と、可動部材を軸方向に移動させる駆動装置と、開口部を上方から塞ぐシャッタ部材25とを有する単軸ロボットにおいて、収容部から上方に突出する可動部材の一部の移動領域を除いたケース部材の上面部上に、この上面部を貫通する貫通孔22eを介して収容部と連通する空気通路部7を形成する。
(もっと読む)
単軸ロボット
【課題】可動部材に中空モータを搭載した単軸ロボットにおいて、そのメンテナンス性を向上させる。
【解決手段】単軸ロボットは、可動テーブル10と、この可動テーブル10に搭載される中空モータ25およびこれにより回転駆動されるナット部材16と、このナット部材16に螺合挿入されるボールねじ軸15とを有し、ナット部材16の回転に伴い可動テーブル10がレールに沿って移動するように構成される。可動テーブル10には中空モータ25の固定部12が設けられており、この固定部25の取付面121に中空モータ25が固定される一方、この取付面121の反対側にナット部材16が回転可能に配置されている。そして、ナット部材16と中空モータ25のロータ30Bとがカップリング20を介して互いに連結されている。これにより中空モータ25が可動テーブル10およびナット部材16に対してボールねじ軸15の方向に脱着可能に組付けられている。
(もっと読む)
金属部品取出装置並びに金属部品取出方法
【課題】 容器内での部品間のブリッジ現象の発生を防止するとともに容器内の部品数が少なくなっても適量の部品を取り出すことが可能であり、且つ作業性に優れる金属部品取出装置並びに金属部品取出方法を提供すること。
【解決手段】 上端に開口部を備える一端有底円筒状の容器を回転させるとともに支持する回転基台と、前記開口部を介して前記容器内外へ上下に電磁石を移動させる上下移動機構と、前記電磁石を水平に移動させる水平移動機構からなる金属部品取出装置であって、前記水平移動機構の第1位置において、前記上下移動機構は、前記容器内部に収容された金属部品を取り出すために前記電磁石を上下に移動させ、該電磁石の上下移動が、前記回転基台の回転中心から離れた前記容器の内壁近傍で行われることを特徴とする金属部品取出装置である。
(もっと読む)
搬送装置
【課題】 搬送装置の汎用性を向上することである。
【解決手段】 ワークWを搬送する搬送装置Tにおいて、ワークWを把持および釈放可能な把持手段Hを備えた伸縮動作可能なアームAと、アームAを水平に往復移動させるとともに移動方向へアームAを遥動させる移動手段Mとを備えたので、ワークWの上方に障害物がある場合にも搬送することが可能となり搬送装置Tの汎用性が向上する。
(もっと読む)
ワーク移送装置
【課題】 従来のワーク移送装置は、ワークを把持するためのチャック爪をワークの寸法に応じて用意する必要があり、そのための段取り替え時間も掛かる。
【解決手段】 本発明によるワーク移送装置は、第1の方向に沿って往復動自在に下板11に取り付けられた昇降テーブル14と、この昇降テーブル14を下板11に対し第1の方向に沿って駆動するテーブル駆動手段と、第1の方向と交差する第2の方向に沿って往復動自在に昇降テーブル14に取り付けられたヘッドプレート28と、このヘッドプレート28を昇降テーブル14に対し第2の方向に沿って駆動する旋回駆動モータ21と、ワークを挟持し得るようにそれぞれ往復動自在にヘッドプレート28に取り付けられ、ワークの寸法に応じて対向間隔がそれぞれ異なる複数組の把持面33aを有する一対のチャック爪33と、この一対のチャック爪33をこれらの対向方向に開閉駆動する把持部材駆動手段とを具える。
(もっと読む)
31 - 40 / 44
[ Back to top ]