
国際特許分類[B25J9/04]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | 腕の運動により特徴づけられるもの,例.直交座標型 (96) | ヘッドの運動自身を除いて,少なくとも一つの腕の旋回によるもの,例.円筒座標型または極座標型 (37)
国際特許分類[B25J9/04]に分類される特許
1 - 10 / 37
産業用ロボット
【課題】産業用ロボットに、3次元の作業に必要十分な構成を与えつつも、その操作について特にスクーリングを必要とせず誰でも視覚的・経験的にティーチング及び操作が可能な産業用ロボットを提供すること。
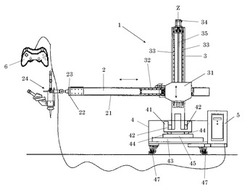
【解決手段】産業用ロボット1が、アーム2と、アームを支えることが可能な柱部材3と、柱部材の土台4とを備える産業用ロボットであって、アームは、柱部材に対して、アーム先端部22からの長さを水平方向に手動で調節可能に取り付けられ、かつ上下(Z軸)に自動でスライド可能であり、柱部材は、土台に対して鉛直線を軸として手動で回転可能に設けられており、かつ自動で水平方向にスライド可能に取り付けられ、ティーチング及び操作機器として、少なくとも1つの十字キー又はレバーと複数のボタンを有するゲームコントローラ6を備えていることからなる。
(もっと読む)
搬送ロボット及びその基板搬送方法

【課題】移動速度を上げなくても搬送時間を短縮することができる搬送装置を提供する。
【解決手段】搬送ロボット50は、第1及び第2ハンド52,53を備えている。第1及び第2ハンド52,53は、基板6を夫々保持する2つのブレード56を有している。また、搬送ロボット50は、回動ユニット、第1進退ユニット、第2進退ユニット、昇降ユニットを有しており、これら4つのユニットにより第1及び第2ハンド52,53を基板6が載置されている基板搬送中継装置25及び4つのプロセスチャンバ23に夫々移動させることができるようになっている。
(もっと読む)
ローダ装置及び部品の搬送方法
【課題】可搬重量の低下及び動作スピードの低下を抑制しつつ小型化することができるローダ装置を提供する。
【解決手段】第1の方向に沿って延びる動力伝達軸4には、外周面に螺旋状の螺子溝及び第1の方向に沿って延びるスプライン溝が形成されている。動力伝達軸4に螺合されたボールねじナット7は、第1駆動モータ31から伝達された回転運動をねじ作用により動力伝達軸4の第1の方向の直線運動に変換する。動力伝達軸4に装着されたボールスプラインナット8は、第2駆動モータ41から伝達された回転運動を動力伝達軸4に伝達して動力伝達軸4を該動力伝達軸4の中心軸線L2回りに回転させる。チャック66が連結された動力伝達ベルト64は、第1の方向に沿って動力伝達軸4と一体移動可能であるとともに、動力伝達軸4から伝達された動力伝達軸4の中心軸線L2回りの回転運動を第2の方向の直線運動に変換してチャック66に伝達する。
(もっと読む)
ロボット
【課題】X軸方向に水平に延びる直動レールに沿って移動される移動体を備えるものにあって、必要な可動範囲及び移動速度を確保しながらも、上下方向の小型化を図る。
【解決手段】移動体3を、X軸移動用モータ5の駆動により直動レール2に沿ってX軸方向に移動するように設け、移動体3の前面部に、旋回アーム9を、r軸用モータ10の駆動によりr軸を中心に旋回するように設ける。旋回アーム9の先端に、テレスコピック型の伸縮アームからなる直動アーム12を、Y軸移動用モータの駆動によりY軸(前後)方向に自在に移動(伸縮)するように設け、直動アーム12の筒状部14aの先端に、作業用ツールが装着される手首部11を、T軸を中心に同軸回転するように設ける。
(もっと読む)
基板搬送ロボット
【課題】構造の大型化を防止しつつ、大型重量基板を安全且つ的確に搬送できるロボットを提供する。
【解決手段】本発明のロボット1は、基板が略水平に保持されるエンドエフェクタ22と、エンドエフェクタ22を垂直方向に駆動する垂直駆動手段18と、垂直駆動手段18を水平方向に駆動する水平駆動手段11と、水平駆動手段11を垂直方向の回転軸線17周りに回転駆動する回転駆動手段14と、を備える。垂直駆動手段18にエンドエフェクタ22の端部が接続される。水平駆動手段11に垂直駆動手段18の端部が接続される。
(もっと読む)
基板搬送システム
【課題】コンパクトなレイアウトを採用可能とするロボットを備えた基板搬送システムを提供する。
【解決手段】本発明の基板搬送システムはロボット1を備え、その周囲に基板搬出入手段4及び基板処理装置5が配置される。ロボット1は、基板100が略水平に保持されるエンドエフェクタ22と、エンドエフェクタ22を垂直方向に駆動する垂直駆動手段18と、垂直駆動手段18を水平方向に駆動する水平駆動手段11と、水平駆動手段11を垂直軸線17周りに回転駆動する回転駆動手段と、を備える。垂直駆動手段18にエンドエフェクタ22の端部が接続され、水平駆動手段11に垂直駆動手段18の端部が接続される。
(もっと読む)
基板搬送装置およびそれを備えた基板処理装置
【課題】複数枚の基板の一括搬送および1枚の基板の枚葉搬送の切換えに要する時間を短縮することができ、構成も簡略化できる基板搬送装置およびそれを用いた基板処理装置を提供する。
【解決手段】搬出入機構4は、複数枚の基板Wを積層状態で一括して保持するバッチハンド40と、このバッチハンド40を進退させるバッチハンド進退機構と、1枚の基板Wを保持する枚葉ハンド39と、この枚葉ハンド39を進退させる枚葉ハンド進退機構と、バッチハンド進退機構および枚葉ハンド進退機構を保持する保持ベース41と、保持ベース41を上下動させる昇降ブロック43と、前記保持ベース41を鉛直方向に沿う旋回ブロック42とを含む。
(もっと読む)
基板処理装置およびその方法ならびに基板搬送装置
【課題】基板の搬送時間を十分に短縮できる基板処理装置およびその方法ならびに基板搬送装置を提供する。
【解決手段】インデクサブロックおよび処理ブロックからなる基板処理装置において、インデクサブロックと処理ブロックとの間で、基板WがインデクサロボットIRにより搬送される。インデクサロボットIRは上下に並ぶように設けられた複数のハンド要素260を備える。ハンド要素260間の距離は、インデクサブロックに搬入される基板Wが収納されたキャリアの基板収納溝間の距離と等しい。また、インデクサブロックおよび処理ブロック間に設けられる基板載置部PASS2の上下に隣接する支持板51a間(および支持板52a間)の距離は、ハンド要素260間の距離の2倍である。
(もっと読む)
ロボット及び生産システム
【課題】ワーク搬送路に沿って並ぶ複数の工程エリアに夫々設けられたロボットにより、ワークに対して複数の作業工程を順に実行するものにあって、全体の小型化を図る。
【解決手段】ワークWが搬送されるワーク搬送路13に沿って、ワークWに対する作業を順に行うロボット12を備える複数個の作業ステーション14〜17を配置して生産システム11を構築する。ロボット12を、直線移動レール18の下面側に自在に移動される移動体の下面部にベースを連結し、そのベースの下面に水平旋回アーム21を垂直軸J1を中心に旋回するように取付け、水平旋回アーム21の先端面に昇降体を上下動するように取付け、この昇降体の下面側に手首部を垂直軸を中心に同軸回転するように取付け、手首部にワークWを把持するための作業用ツールを取付けて構成する。
(もっと読む)
ロボット及び生産システム
【課題】ロボットによる作業を行う生産システムにあって、全体をコンパクトに配置しながら、比較的低コストで構築することを可能とし、しかも人に対する安全性を高める。
【解決手段】ロボット12の直動軸を構成する直線移動レール13の片側に、ロボット12がワークWに対する作業を行う複数個の作業ステーション14〜16を配置して生産システム11を構築する。ロボット12を、直線移動レール13の下面側に自在に移動される移動体の下面部にベースを連結し、そのベースの下面に水平旋回アーム21の基端部を垂直軸J1を中心に旋回するように取付け、水平旋回アーム21の先端面に昇降体を上下動するように取付け、この昇降体の下面側に手首部を垂直軸J2を中心に同軸回転するように取付け、手首部にワークWを把持するための作業用ツールを取付けて構成する。
(もっと読む)
1 - 10 / 37
[ Back to top ]