
国際特許分類[B25J9/10]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | マニプレータ要素の位置決め手段に特徴のあるもの (394)
国際特許分類[B25J9/10]の下位に属する分類
電気的なもの (2)
流体的なもの
国際特許分類[B25J9/10]に分類される特許
21 - 30 / 392
ロボットの制御装置
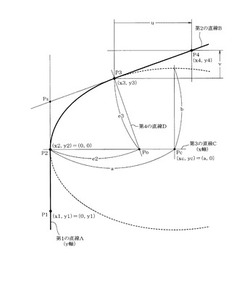
【課題】円弧状部分から直線部分に入る位置を正しくティーチングできず、直線部分に入った位置をティーチングしてしまっても、ツール先端に円弧状部分により近い形状の軌跡を辿らせる。
【解決手段】4つのティーチング位置P1〜P4のうち、P1からP2の間、P3からP4の間は直線補完する。P2が作業対象部分の直線部分から円弧状部分に入った位置に正しくティーチングし、P3は円弧状部分から直線部分に入った位置をティーチングした場合、P2とP3との間は楕円で曲線補間する。この場合、P2には楕円の長径部分が接するので円に近く、P3には短径部分が接するので直線に近くなり、結果として作業対象部分の形状に近くなる。
(もっと読む)
多関節型ロボットの制御装置,制御方法及び制御プログラム

【課題】速度抑制処理において,手首先端の位置及び手首先端の移動速度と軸の許容速度とを維持し且つ目的の座標系における姿勢角度の特定成分の変動を抑制すること。
【解決手段】教示経路上の補間点における位置,姿勢及び各軸の角度を算出しながら動く多関節ロボットにおいて,手首軸の速度が許容限度を超えるかを判別し,許容限度を超える場合に,速度を許容限度内にした該手首軸の角度の複数の候補を算出し,複数の該候補の中から溶接線座標系の姿勢角の特定成分の変動が最も抑制された候補を選択して該手首軸の角度にし,これに対応する他の軸の角度を再度算出して次の補間点の角度にし,多関節ロボットを駆動させることを特徴とする。
(もっと読む)
ロボットの制御方法およびロボットの制御装置
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、現在位置における各軸の回転角度を基準とした各軸の回転角度の変化量を示す各軸移動距離に基づく第1評価指標を設定し、ツールの先端位置を変化させないという束縛条件の下で、その第1評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
ロボットの制御方法およびロボットの制御装置
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間に基づく評価指標を設定し、その評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
ロボットの制御方法およびロボットの制御装置
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間と、移動後のツールの先端位置の目標位置に対する位置誤差とに基づく評価指標を設定し、その評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
多関節型ロボットの制御装置,制御方法及び制御プログラム
【課題】多関節型ロボットの作業部の位置及び移動速度を維持しつつ,第1関節駆動系の駆動軸各々の角度を確実に作業終了点の角度に到達させること。
【解決手段】例外条件が充足していない場合はステップS5で算出される補間点に基づいて第1及び第2関節駆動系の駆動軸各々を駆動する(S64)。例外条件が充足した後(S61のYes側),作業部が作業終了点に到達するまでの間は(S12のNo側),第1関節駆動系の駆動軸各々を作業終了点の角度を目標として線形に変化させるための該第1関節駆動系の駆動軸各々の角度を算出すると共に(S8),該算出された第1関節駆動系の駆動軸各々の角度とステップS5で算出された補間点における作業部の位置とに基づいて第2関節駆動系の駆動軸各々の角度を算出し(S9),該算出結果に従って第1及び第2関節駆動系の駆動軸各々を駆動させる(S11)。
(もっと読む)
ロボットの制御方法およびロボットの制御装置
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間に基づく第1評価指標を設定し、その第1評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
ロボットの制御方法およびロボットの制御装置
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間に基づく評価指標を設定し、その評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
ロボット制御装置およびキャリブレーション方法
【課題】ロボットの関節軸を動作限界位置でキャリブレーションできない場合においても、限られた空間の中で精度良くキャリブレーションすることが可能な技術を提供する。
【解決手段】ロボット制御装置200は、ロボット本体の関節軸上の任意のキャリブレーション位置に関節軸が移動された場合において、アブソリュートエンコーダから位置情報を取得し、取得した位置情報に含まれる一回転内位置が、多回転位置をカウントする基準となる原点を含まない所定の許容範囲に含まれるか否かを判定する。そして、一回転内位置が、許容範囲に含まれない場合には、一回転内位置が許容範囲に含まれるまで、キャリブレーション位置の移動を要求し、一回転内位置が許容範囲に含まれる場合には、取得した位置情報と関節軸の制御位置とに基づいて、関節軸の位置を補正するための補正値を決定する。
(もっと読む)
ロボットの制御方法およびロボットの制御装置
【課題】動作時間を引き延ばすことなく、PTP動作を行う際に消費するエネルギーを低減する。
【解決手段】ロボットをPTP制御する際、各軸単位での動作時間が最も短くなるように各軸を駆動するための速度指令を演算する演算処理を実行し、それら演算された各速度指令を実行するタイミングを決定するタイミング決定処理を実行する。タイミング決定処理では、動作時間が最も長い速度指令から順に、その次に動作時間の長い速度指令との間において互いに減速動作が行われない減速余白期間が存在するか否かを判断し、減速余白期間が存在する場合且つその減速余白期間内に収まる減速期間を持つ速度指令が存在する場合、その速度指令における減速期間が減速余白期間内に収まるように、その速度指令を実行するタイミングを決定する。これにより、全体の動作時間を従来と同等にした上で、各速度指令における減速期間が分散化される。
(もっと読む)
21 - 30 / 392
[ Back to top ]