
国際特許分類[B25J9/10]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | マニプレータ要素の位置決め手段に特徴のあるもの (394)
国際特許分類[B25J9/10]の下位に属する分類
電気的なもの (2)
流体的なもの
国際特許分類[B25J9/10]に分類される特許
81 - 90 / 392
速度制御ロボット機構におけるワークスペース制限の応用
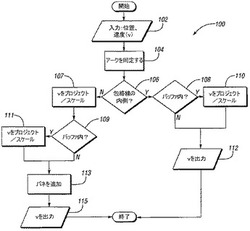
【課題】作業スペース限界で、滑らかな安定した動作を行う。
【解決手段】速度制御信号に応答し、凸多角形境界により画定される許容される作業スペースを備え、ホストマシンは、境界に対する、機構上の参照ポイントの位置を決定する。ホストマシンは、位置の関数として速度制御信号を自動的に形成することで境界を守らせるためのアルゴリズムを含む。それにより、境界のエッジおよび角部に沿って、機構の滑らかな乱れのない動作を提供する。このアルゴリズムは、高い速度、および/または、外力が存在する用途に適している。ホストマシンは、参照ポイントの位置の関数として速度制御信号を形成することにより境界を守らせるアルゴリズムを含み、また、このアルゴリズムを実行するハードウェアモジュールを含む。また、凸多角形境界を守らせるための方法が提供され、この方法は、ホストマシンを介して、参照ポイントの位置の関数として速度制御信号を形成する。
(もっと読む)
制御装置

【課題】処理負荷が増大することを抑制しつつ、ロボットに相互作用を伴うタスクを実行させることができるロボットの制御装置を提供する。
【解決手段】第1対象物T1に対して非接触状態から接触状態へ遷移する第1動作区分D1および第1対象物T1に対して接触状態から非接触状態へ遷移する第2動作区分D2では、ロボットRまたはロボットRと一体となった第2対象物T2と第1対象物T1との干渉判定を省略する。一方、これらの動作区分に連続する第3動作区分D3では、第1対象物T1を含めて干渉判定を実行する。
(もっと読む)
マニピュレータのキャリブレーション方法及びロボット制御システム
【課題】
マニピュレータのキャリブレーションをどこでも簡単に行うことができ、治具の準備などの作業工数を大幅に削減でき、特別な治具が準備できない環境でも即座にキャリブレーションを行うことが可能であり、マニピュレータに求められる本来の作業を行うための不必要な待ち時間や工数を削減する。
【解決手段】
複数の観測位置姿勢毎にレーザ変位センサLSにより治具Gの直線部上の点をそれぞれ検出する。検出した値から直線部上の検出点のロボット座標系の座標を、観測位置姿勢毎にそれぞれ求める。検出点の2つを一組として複数の組からロボット座標系を基準とした直線部の単位方向ベクトルを複数算出する。算出した直線部の単位方向ベクトルと、ロボット座標系のベクトル変数で表される直線部の単位方向ベクトルから連立方程式を作り、最小二乗法によりマニピュレータのキャリブレーションを行う。
(もっと読む)
タンデムアーク溶接システムを制御するロボットコントローラ、それを用いたアーク倣い制御方法およびタンデムアーク溶接システム
【課題】アーク倣いを任意の回転中心で行った場合においても、先行極に位置ずれが発生せず、溶接欠陥が生じることのないタンデムアーク溶接システムを制御するロボットコントローラ、それを用いたアーク倣い制御方法およびタンデムアーク溶接システムを提供する。
【解決手段】タンデムアーク溶接システムを制御するロボットコントローラ8は、先行極処理部11aが算出した先行極変化量から左右および上下方向の位置ずれを補正する先行極補正量を算出する先行極補正部14aと、後行極処理部11bが算出した後行極変化量から回転方向の位置ずれを補正する後行極補正量を算出する後行極補正部14bと、先行極2aの位置ずれを補正する回転中心補正量を算出する回転ずれ補正制御処理部16と、ティーチング位置と倣い補正時における溶接トーチ2の回転中心の位置を補正するロボット軌跡計画処理部13と、を備える。
(もっと読む)
ロボット、制御システムおよび制御プログラム
【課題】制御対象の動作の連続性または円滑性の維持を図ることができるシステム等を提供する。
【解決手段】本発明の制御システム1およびその制御対象であるロボットRによれば、空間補間用の基底関数を結合係数とする、モデル空間に配置された点列の線形結合として表現される線分を生成する補間処理が実行されることにより、目標位置軌道が生成される。このため、モデル空間に配置された複数の点のそれぞれを通る折れ線ではなく、当該複数の点(制御点)の線形結合により表わされる、始点および終点を連続的にまたは滑らかに接続する線分が制御対象の目標位置軌道として生成される。
(もっと読む)
ロボットキャリブレーション装置及びキャリブレーション方法
【課題】 ロボットキャリブレーションにおける精度を維持しつつ作業負荷を低減することを目的とする。
【解決手段】 ロボットの先端に弾性変形領域を持つプローブを取り付け、キャリブレーション用の定盤平面に垂直になる位置を教示することで、ロボットと定盤の位置関係をラフに教示し、さらにプローブ先端位置一定動作を生成し、位置検出動作指令を生成し、位置検出動作を実行し、プローブ先端位置一定動作時の精度(誤差)を計算し、測定したプローブ先端位置一定動作時の精度(誤差)と幾何学的パラメータ誤差からキャリブレーションを自動実行する。
(もっと読む)
ロボットの教示手順校正装置および方法
【課題】ロボットの特徴である高速性を失わずに作業対象物に接触するとともに接触位置検出し、エンコーダ分解能程度のサブミリ単位の高精度検出することで、高速高精度なロボットの作業座標系のキャリブレーション(校正)方法を提供する。
【解決手段】弾性変形領域を持ったプローブを用いて、位置姿勢誤差発生前後において接触位置検出処理を所定回数繰り返すことで、ロボット座標に対する作業対象物の位置姿勢を算出し、位置姿勢誤差を計算し、位置誤差発生前の教示データを修正するという手順で処理する。
(もっと読む)
ロボット、制御システムおよび制御プログラム
【課題】制御対象の効率的な動作を表現する軌道の確実な探索と、当該軌道の探索時間の短縮を図ることができるシステム等を提供する。
【解決手段】本発明の制御システム1によれば、空間補間用の基底関数を結合係数とする、モデル空間に配置された点列の線形結合により表現される線分を生成する補間処理が実行される。その結果、各関節機構の屈曲状態(各軸回りの回転角度により表現される。)を表わすクォータニオンの目標軌道またはその候補が生成される。
(もっと読む)
視覚センサを有するマニピュレータのセンサキャリブレーション方法及びロボット制御システム
【課題】
視覚センサを持つマニピュレータのキャリブレーションをどこでも簡単に行うことができ、作業工数を大幅に削減でき、特別な治具が準備できない環境でも即座にキャリブレーションを行うことを可能とする。
【解決手段】
マニピュレータMの周囲に配置された治具Gの直線部上の点を複数の観測位置姿勢毎にレーザ変位センサLSによりそれぞれ検出する。次にリンクパラメータと、レーザ変位センサLSが検出した値から直線部上の検出点であるロボット座標系の座標を、観測位置姿勢毎にそれぞれ求める。検出点の2つを一組として複数の組からロボット座標系を基準とした直線部の単位方向ベクトルを複数算出する。算出した直線部の単位方向ベクトルと、ロボット座標系のベクトル変数で表される直線部の単位方向ベクトルから連立方程式を作り、最小二乗法により較正値を求める。
(もっと読む)
パラレルリンクロボットの動作方法
【課題】パラレルリンクロボットの駆動モータには、常に過大な負荷が繰返しかかることが多い。更に高速な動作や、過大な負荷をかける必要があるときには、一般には、より大型で高出力なモータを採用するか、減速機等をもちいて、トルクを増大する方法を採択することになる。しかしながら前記従来の技術では、パラレルリンクロボット自体の構成が、高出力化、大型化するために、コストアップを伴うという課題がある。
【解決手段】本発明のパラレルリンクロボット21は、移動開始点と移動終了点座標情報から、適切な移動姿勢を演算する機能を有し、移動開始前もしくは、移動中に、駆動負荷が軽減する姿勢をとり、移動を行うことを可能とする。
(もっと読む)
81 - 90 / 392
[ Back to top ]