
国際特許分類[B25J9/10]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | マニプレータ要素の位置決め手段に特徴のあるもの (394)
国際特許分類[B25J9/10]の下位に属する分類
電気的なもの (2)
流体的なもの
国際特許分類[B25J9/10]に分類される特許
1 - 10 / 392
力制御関節を有する有脚ロボットのための運動学的および動力学的キャリブレーション方法
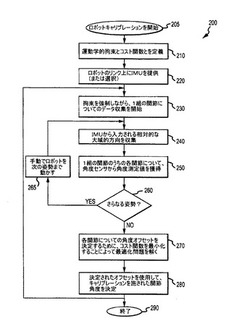
【課題】力制御2足人型ロボットのキャリブレーションを行うための方法。
【解決手段】方法は、2足を床に平らに接触させて維持するなど、人型ロボットについての運動学的拘束を選択する。方法は、運動学的拘束を強制しながら人型ロボットを動かして、複数の姿勢をとらせる。方法は、姿勢をとらせる工程中に、人型ロボットの関節について角度測定値を収集することと、その後、プロセッサを用いて運動学的キャリブレーションモジュールを実行し、ロボット関節についての角度オフセットを決定することとを含む。方法は、動かす工程中に、骨盤リンクに取付けられた慣性運動ユニットから相対方向データを収集することを含み、角度オフセットは、相対方向データを使用して決定される。全てのデータは、ロボット上のデバイスから収集され、外部データ収集は、必要とされない。
(もっと読む)
多関節ロボットのツールセンターポイント設定方法、及びツールセンターポイント設定用の治具の取付構造

【課題】多関節ロボットの手首軸フランジに設定されたフランジ座標系に基づいて、手首軸フランジに装着されるツールでのツール座標系を設定するツールセンターポイント(TCP)設定作業の後、速やかにツールによる作業を行うことができ、ツールの手首軸フランジへの装着位置にずれを生じさせない。
【解決手段】多関節ロボット1の手首軸フランジ2に装着されたツール5(吸着パッド6)にTCP設定を行うための治具7を取り付けてTCP設定作業を行い、作業終了後、治具7をツール5から取り外す。ツール5をロボット1の手首軸フランジ2から取り外すことなく、TCP設定作業を行うので、作業終了後、速やかにツール5による作業を行うことができる。また、ツール5が手首軸フランジ2に固定されたままなので、TCP設定作業を行っても、ツール5の手首軸フランジ2への装着位置にずれが生じない。
(もっと読む)
ロボット制御システムおよびロボット制御方法
【課題】相互に連結された複数のロボットを容易かつ確実に制御すること。
【解決手段】複数のロボットと、かかるロボットが共有する可動軸である少なくとも1つの外部軸とを備えるようにロボット制御システムを構成する。また、1つの上記ロボットについてすべての上記外部軸が連結された仮想ロボットを擬制し、かかる仮想ロボットごとに取得した上記ロボットおよび上記外部軸の位置についての取得値それぞれを所定の基準座標系における絶対位置を示す変換値へ変換する変換部を備えるようにロボット制御システムを構成する。
(もっと読む)
6軸ロボットの軸間オフセット検出方法
【課題】6軸ロボットにおいて、軸間オフセットのずれ量を計測しこれを補正する。
【解決手段】手先に発光ダイオードを設け、先端2軸直交点(第5軸と第6軸との交点)をロボット座標のX軸上の複数の移動目標位置(白抜き丸印)に移動させる。各移動目標位置で、発光ダイオードを第6軸を中心に回転させてその回転軌跡を3次元計測器により計測すると共に、発光ダイオードを第5軸を中心に回転させてその回転軌跡を3次元計測器により計測する。そして、2つの回転軌跡から2つの回転中心線を求め、両回転中心線の交点を先端2軸直交点の実際の移動位置(×印)とし、移動目標位置と実際の移動位置との誤差から軸間オフセット量Fを検出する。この軸間オフセット量FによってDHパラメータを補正する。
(もっと読む)
溶接ロボット制御装置
【課題】
レーザセンサを用いて相対位置方式により教示点の位置補正を行う場合、レーザセンサの着脱等により溶接トーチとの取付位置関係が狂うと、教示修正に多大な時間を要する。
【解決手段】
S10でレーザセンサと溶接トーチ間のキャリブレーションを行い、新センサ−トーチ変換行列CT2Tを得て、S20で記憶部に格納する。S30で差分変換行列OTNの演算を行う。S40で予め選択しておいた作業プログラムに対して、センシング命令に記憶された検出基準点を探索する。S50で、見つけ出した検出基準点に対してそれぞれ差分変換行列OTNを乗算して、検出基準点を更新する。
(もっと読む)
ロボット、ロボット制御装置、ロボット制御方法、およびロボット制御プログラム
【課題】ロボットキャリブレーション誤差やカメラキャリブレーション誤差等があっても精度良く制御可能なロボット、ロボット制御装置、ロボット制御方法、およびロボット制御プログラムを提供することを目的としている。
【解決手段】撮像装置60と、第1〜第4の時刻にロボットのアームに設けられた撮像装置が出力する第1〜第4の画像データを取得する画像取得部103と、第1と第2の画像データとに基づき第3の時刻の画像データを推定し、推定した第3の時刻の画像データと取得された第3の時刻の画像データとの誤差を算出し、算出した誤差に基づき第4の時刻の画像データに含まれる誤差を算出する画像推定部109と、アームを制御するアーム制御部101とを備え、画像推定部は算出した第4の時刻における画像データに含まれる誤差を補正して第4の時刻の画像データを推定し、アーム制御部は推定された第4の時刻の画像データを用いてアームを制御する。
(もっと読む)
6軸ロボットの軸間オフセット検出方法
【課題】6軸ロボットにおいて、軸間オフセットのずれ量を計測しこれを補正する。
【解決手段】ロボットアームの先端のフランジに発光ダイオードを設け、手先をロボット座標のX(Xb)軸上の複数の移動目標位置に移動させる。このとき、発光ダイオードの位置を3次元計測器により計測し、手先が正しく移動目標位置に移動したときの発光ダイオードの位置と実際の移動位置とを基にして軸間オフセット量Fを検出する。この軸間オフセット量FによってDHパラメータを補正する。
(もっと読む)
軌道生成システム
【課題】指定関数により定義される軌道を生成する際、当該指定関数を目標値に一致させる指定時刻の変更を許容しながらも、当該指定関数の時間微分関数の連続性を確保しうるシステムを提供する。
【解決手段】本発明の軌道生成システムによれば、評価関数の指定期間にわたる積分値が最小になるという「第1の条件」が満たされるように指定関数pが生成される。評価関数は3階指定関数p(3)(t)の絶対値の高低を表わす。また、2階指定関数p(2)(t)の値がリミッタ範囲[p(2)min_c,p(2)max_c]内に制限されるという「第2の条件」が満たされるように指定関数p(t)が生成される。
(もっと読む)
水平多関節ロボット、および水平多関節ロボットのキャリブレーション方法
【課題】簡略な方法で、かつ正確にキャリブレーションを実行することができる水平多関節ロボット、および水平多関節ロボットのキャリブレーション方法を提供する。
【解決手段】水平多関節ロボットは、基台と、前記基台に回動可能に連結される第1アームと、前記第1アームに回動可能に連結される第2アームと、前記第1アームを前記基台に対して水平方向に回動する第1駆動部と、前記第2アームを前記基台に対して水平方向に回動する第2駆動部と、を備え、前記第1アームの前記基台との連結部には、前記第1アームと一体成型され前記第1アームの回動方向に第1の幅を有した第1のマークが設けられ、前記基台の前記第1アームとの連結部には、前記基台と一体成型され前記第1の幅と同じ幅の第2のマークが設けられ、前記第1アームが前記基台に対して所定の位置に回動すると、前記第1のマークと前記第2のマークとが対向するように配置されている。
(もっと読む)
ロボットのツールパラメータの補正方法
【課題】簡便なロボットの動作によって、作業者の熟練度や技量などに因らず短時間で精度よく、ツールパラメータを補正する方法を提供する。
【解決手段】溶接ロボット2のアーム先端に設けられるフランジ部7に取り付けられた溶接ツール6の先端位置を決定するツールパラメータを導出する方法において、溶接ツール6に3つ以上の姿勢角をとらせ、各姿勢角において溶接ツール6の先端点Pを基準面である平板8までベース座標系における一Zb方向に移動させる。その上で、各姿勢角において、溶接ツール6の先端点Pが平板8に到達したときの先端点Pの位置ずれ量を計測して並進成分変化量を求め、当該求めた並進成分変化量を基にツールパラメータを補正する。
(もっと読む)
1 - 10 / 392
[ Back to top ]