
国際特許分類[B25J9/16]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | プログラム制御 (534)
国際特許分類[B25J9/16]の下位に属する分類
電気的なもの (3)
流体的なもの
記録または再生システム (483)
国際特許分類[B25J9/16]に分類される特許
1 - 10 / 48
産業用ロボット
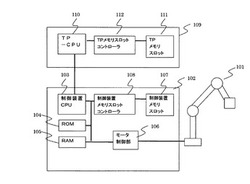
【課題】アラーム発生時にどのデータを記録するかは予め設定されており、運転稼動中に運転を停止させることなく、どのデータを記録するのか設定することができない。
【解決手段】ロボットと、前記ロボットを制御するロボット制御装置と、前記ロボットを操作するティーチペンダントとを備えた産業用ロボットであって、前記ロボット制御装置および/または前記ティーチペンダントは記録メディアスロットを有し、前記記録メディアスロットに接続された記録メディア内に記憶されており前記産業用ロボットの動作中に記憶する情報を定義した記録方法ファイルを前記記録メディアの接続時に自動的に読み出し、前記記録方法ファイルを構成しており情報を記録するトリガとなる記録トリガの監視や記録した情報の書き出しを含む処理を行う解析用機能の実行を自動的に開始する。
(もっと読む)
制御装置

【課題】タスクの実行開始を早めることができ、かつ、ロボットの動作が不連続性となることを防止することができるロボットの制御装置を提供する。
【解決手段】将来外界予測部130によりタスクの各実行段階における対象物の予測位置および予測姿勢を予め予測しておき、少なくともロボットRにより次に実行される実行段階におけるロボットRの目標軌道を生成しておく。
(もっと読む)
プログラム作成装置及びプログラム作成方法
【課題】作業ブロックの設定作業において作業者の負担を軽減する技術を提供する。
【解決手段】プログラム作成装置は、作業ブロック定義部41と、工程フロー編集部42と、制御プログラム生成部43とを備える。工程フロー編集部42は、複数の作業ブロック情報を所望の順序で並べて得られる工程フローにおいて、処理対象作業ブロック情報よりも後続の設定対象ブロック情報の内部状態情報を、当該処理対象ブロック情報の事後条件を用いて設定する。制御プログラム生成部43は、工程フロー編集部43により内部状態情報が設定された複数の作業ブロック情報に基づいて制御プログラムを生成する。
(もっと読む)
液滴吐出装置
【課題】生産効率を向上させる液滴吐出装置を提供する。
【解決手段】ワーク5に液滴を吐出する前にワーク5に前処理を施す前処理部20と、液滴を水平方向に吐出可能に取り付けられた液滴吐出ヘッドを備え、液滴吐出ヘッドから液滴を吐出して液滴をワーク5に塗布する液滴吐出部30と、液滴が吐出されたワーク5に後処理を施す後処理部50と、ワーク5を鉛直方向に吊り下げて把持可能なチャック部78を有する搬送部70と、を有し、前処理部20と、液滴吐出部30と、後処理部50とが搬送部70のチャック部78の移動範囲6内において順に配置され、搬送部70のチャック部78がワーク5を把持した状態で前処理部20と、液滴吐出部30と、後処理部50とを順次移動可能に構成する。
(もっと読む)
加工システム及び加工方法
【課題】自動車の生産工程のうちルーフ工程の省スペース化や作業の効率化を図ること。
【解決手段】ハンドジグ付ロボット11は、ワーク21をパネルストック12から取り出す。ハンドジグ付ロボット11は、ワーク21を固定シーリングガン13に対して相対的に移動させる。これにより、固定シーリングガン13から噴出されるシーラが、ワーク21に塗布される。ハンドジグ付ロボット11は、ワーク21をシーラ用位置決め治具14に固定する。ハンドジグ付ロボット11は、ワーク21を溶接用位置決め治具15に固定させ、ワーク21に対してスポット溶接を行う。ハンドジグ付ロボット11は、ワーク21を払出し場所(図示せず)に払い出す。
(もっと読む)
異機種ロボットの協業のためのコンポーネント連動装置およびそれに伴う方法
【課題】本発明は、相異なるコンポーネントモデルに基づいて動作する異機種ロボット間の協業のために、遠隔(サーバ)でロボットを制御し、ロボットコンポーネントが外部(サーバ)のコンポーネントをアクセスできるようにする技術を提供する。
【解決手段】本発明に係る異機種ロボットの協業のためのコンポーネント連動装置は、ロボットの各機能を制御するコンポーネントを制御するための共通の標準インターフェースを提供する標準インターフェース部;外部コンポーネントが標準インターフェース部を介してコンポーネントを呼び出しできるように命令語を伝達するアダプタコンポーネント;およびコンポーネントが標準インターフェース部を介して外部コンポーネントを呼び出しできるように命令語を伝達するプロキシコンポーネントを含むことを特徴とする。
(もっと読む)
ロボットシステム及び物品加工方法並びに工業製品の製造方法
【課題】より少ないコストでロボットを用いた加工作業を行なうことができるようにした、ロボットシステム及び工業製品の製造方法を提供する。
【解決手段】付着材が付着した対象物を保持する保持機構18を装着したマニピュレータ101と、マニピュレータ101の動作を制御するコントローラ101Aと、マニピュレータの近傍に配設され対象物の付着材を保持する付着材剥離ユニット104と、を有し、コントローラ101Aは、保持機構18により保持された対象物の付着材を付着材剥離ユニット104に所定の進入角度で進入させて対象物と付着材とを剥離させる。
(もっと読む)
ロボットコントロール・システム、ロボットコントロール方法
【課題】ロボットコントロール・システムを停止することなく、動作制御装置に追加した機能部の制御プログラムの更新を行うことを可能にしたロボットコントロール・システムおよびロボットコントロール方法を提供することを課題としている。
【解決手段】ロボットコントロール・システム1は、動作制御装置2と動作指示装置3とを備え、ロボット4が接続されている。動作制御装置2は通信部201と通信変換部202と第1記憶部203と第2記憶部204と、プログラム実行部205と第3記憶部206とロボット制御部207と書き換え検証部208を備え、動作指示装置3は通信部301と演算部302とROM303とデータ読出部304と第4記憶部305を備えている。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】簡易な構成で容易にロボットを制御するロボット制御装置を得ること。
【解決手段】データを入出力するI/Oエリア内での位置であるI/O番号3Aと、このI/O番号3Aの位置に書き込まれるデータ4Aと、によって定義された指示情報30Aを、所定のプログラム言語で動作するPLC1から受信すると、指示情報30A内の、I/O番号3Aとデータ4Aに基づいて指示情報30Aに応じた動作をロボット5に行なわせるロボットCPU21を有する。
(もっと読む)
垂直多関節ロボットのミラーイメージプログラム作成方法
【課題】従来のミラー変換方法では、位置と姿勢に対応する行列からロボットの各構成軸の角度を求める逆変換の際に、複数の可能性が存在することによって、所望の結果が得られない場合が生じている。
【解決手段】ミラー対称面を垂直多関節ロボットが設置される面に垂直な垂直多関節ロボットの第1の回転軸の軸心を通る平面とし、第1の回転軸の角度は、ミラー対称面からの角度差を正負反転した角度とし、第1の回転軸が基準値となる角度にある場合の第1の回転軸を通る平面内にある第1の回転軸とは異なる他の回転軸の角度は、各々の回転軸の基準値との差を正負反転した角度となるようにし、第1の回転軸が基準位置となる角度にある場合の第1の回転軸を通る平面に対して垂直な回転軸の角度はそのままとすることにより、元のプログラムからミラープログラムを作成する。
(もっと読む)
1 - 10 / 48
[ Back to top ]