
国際特許分類[B25J9/18]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | プログラム制御 (534) | 電気的なもの (3)
国際特許分類[B25J9/18]に分類される特許
1 - 3 / 3
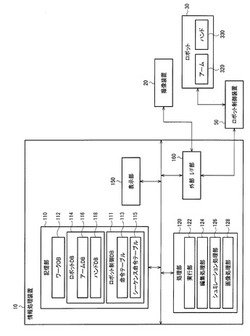
ロボット制御システム、ロボットシステム及びプログラム
【課題】 動作の記述に用いられる命令の処理対象が集合パラメーターであったとしても、動作における命令の構成を変更することなく、容易に所望の動作を実現するロボット制御システム、ロボットシステム及びプログラム等を提供すること。
【解決手段】 ロボット制御システムは記憶部110と、命令を実行する処理部120と、処理部120の処理結果に基づきロボット30の制御を行うロボット制御部(ロボット制御装置50)を含み、記憶部110は処理部120が実行する命令の情報と命令の処理対象を表すパラメーターの情報を記憶し、処理部120は命令が複数の命令により構成されるシーケンス命令であり且つシーケンス命令のパラメーターの属性が集合パラメーターの属性である場合に、シーケンス命令を構成する複数の命令を変更することなく、パラメーターを変えながらシーケンス命令を複数回実行する。
(もっと読む)
干渉回避制御装置

【課題】干渉チェックの見落としによる機器同士の干渉発生をより確実に防ぐことのできる干渉回避制御装置を得ること。
【解決手段】干渉回避制御装置は、補間制御周期での停止予定位置に基づく干渉チェックに見落としが生じうるか否かを判定する第1判定手段11と、干渉チェックに見落としが生じうると判定された見落とし区間において、1補間制御周期を整数で割った周期で停止指令を出した場合の停止予定位置を算出する第1計算手段1と、停止予定位置に基づいて動作機器と他の機器との機器間距離を算出する第2計算手段2と、3点以上の機器間距離に基づいて近似曲線を算出する第3計算手段3と、近似曲線に基づいて見落とし区間における機器間距離の最小値を算出する第1最小値算出手段4と、動作機器と他の機器とが近接した場合の近接距離と最小値とを比較して干渉の有無を判定する第2判定手段5と、を備える。
(もっと読む)
遠隔操作型作業用ロボット
【課題】 装置構成が簡単で装置コストが低く、操作が簡単で誤操作を起こし難い、床下等の狭・暗・閉所で操作者が直接ロボットを視認できない箇所での点検・診断・薬液散布等各種作業を、モニターで車体前進方向を監視しつつ遠隔操作で安全・確実に実施可能な遠隔操作型作業用ロボットを提供する。
【解決手段】 遠隔操作ボックスに設けた自動中立位置復帰型の、第1スティックT1の操作による電動自走車体操作・移動制御手段、第2スティックT2の操作による電動水平回転基盤操作・制御手段と電動上下回動ヘッド操作・制御手段、前進時自動的に又は水平回転モード第1切替スイッチS5の切替操作でTVカメラが車体前進方向を向くよう制御するTVカメラ第1前向き復帰・固定手段15と、上下回動モード切替スイッチS2の切替操作でTVカメラが車体前部の一部を撮像可能な上下定方向へ向くよう制御するTVカメラ上下定方向復帰・固定制御手段16を設けることを解決手段とする。
(もっと読む)
1 - 3 / 3
[ Back to top ]