
国際特許分類[B60G21/05]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両懸架装置 (7,837) | 2以上の弾性的に懸架された車輪のための相互連結方式,例.加速,減速または遠心力に関して車体を安定させるためのもの (727) | 常時相互連結されているもの (726) | 機械的に相互連結されているもの (613) | 車両の同じ車軸上の左右の異なる側の車輪間に相互連結されているもの,すなわち.相互連結された左右の車輪懸架装置の車輪間に相互連結されているもの (603)
国際特許分類[B60G21/05]の下位に属する分類
スタビライザーバー (576)
国際特許分類[B60G21/05]に分類される特許
1 - 10 / 27
車体傾動制御装置、車体傾動制御方法
【課題】車体を旋回内側に傾動させるときの旋回性能を改善することである。
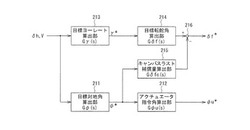
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を設定し、設定した目標対地傾斜角φ*に応じて、駆動モータ3を駆動制御する。そして、車体の目標ヨーレートγ*を設定し、目標ヨーレートγ*及び車体のロール方向に沿った旋回内側への傾斜角に応じて、車体のヨーレートを制御する。具体的には、操舵角及び車速に応じて、車体の目標ヨーレートγ*を設定し、車体をロール方向に沿って旋回内側に傾斜させるときのキャンバスラストに起因したヨー運動分に相当するキャンバスラスト分補償量δcを算出する。そして、目標ヨーレートγ*及びキャンバスラスト分補償量δcに応じて、車体のヨーレートを制御する。
(もっと読む)
車両用サスペンション制御装置

【課題】スタビライザの状態を変化させる場合の車両のロール方向のばね力とロール方向の減衰力との比の変動を抑制することができる車両用サスペンション制御装置を提供すること。
【解決手段】左車輪に接続された左スタビライザバー11と右車輪に接続された右スタビライザバー12とを連結した連結状態と、左スタビライザバーと右スタビライザバーとを遮断した遮断状態とに切替え可能なスタビライザ10と、左車輪および右車輪にそれぞれ配置されたエアサスペンションと、左車輪に配置されたエアサスペンション41FLの空気室41dと右車輪に配置されたエアサスペンション41FRの空気室とを連通する通路53Fと、通路の流路断面積を変更する調節機構55と、を備え、スタビライザの連結状態と遮断状態とが切り替わるときの車両のロール方向のばね力とロール方向の減衰力との比の変動を抑制するように調節機構を制御する。
(もっと読む)
エアサスペンション装置
【課題】 エアサスペンション装置の全体構成が複雑化することを回避しつつ、車体設計の自由度を損なうことなくロール剛性の強化にともなうバネ下重量の増加を抑制する。
【解決手段】 アクスルハウジング2に取り付けた前後方向に沿う左右一対のサスペンションビーム3と車体フレーム5のサイドメンバ6とをエアスプリング7を介して結合する。車体フレーム5とアクスルハウジング2の上部とをアッパリンク9を介して連結する。アクスルハウジング2の前方に配した第1スタビライザ10をサスペンションビーム3に保持させてそのアーム部12の先端をサイドメンバ6から垂下させたブラケット13の下端に枢着する一方、アクスルハウジング2の後方に配した第2スタビライザ14を車体フレーム5に保持させてそのアーム部16の先端をサスペンションビーム3に枢着したことにより、両スタビライザで所定のロール剛性を確保するようにした。
(もっと読む)
揺動式車両の自立操作装置
【課題】簡易な構造で揺動式車両の揺動角を任意に可変とし、走行状況等に応じて車両を所望の揺動姿勢で保持させる操作を行うことを可能とする。
【解決手段】前側車体部と後側車体部とを連結し、後側車体部を前側車体部に対して左右方向に揺動可能に連結するジョイントケース30を備えた自動三輪車において、ジョイントケース30の揺動軸32にプーリー41を固定し、ステップフロア13に乗員の足によって操作される左右一対の足操作子42,43を設け、プーリー41と足操作子42,43とをケーブル44,45で連結し、足操作子42,43から付与される乗員の踏力をプーリー41を介して揺動軸32に伝達することにより、後側車体部に対する前側車体部の揺動角を任意に可変とする。
(もっと読む)
車両用ロール制御システム
【課題】ロール抑制装置に対する負荷を軽減することができ、かつ応答性を確保することができる車両用ロール制御システムを提供すること。
【解決手段】車両のロールを抑制するアンチロールモーメントMstを発生させる第一のロール抑制装置と、アンチロールモーメントMspを発生させ、かつ第一のロール抑制装置よりも応答性の低い第二のロール抑制装置と、を備え、第一のロール抑制装置と第二のロール抑制装置とによって発生させるアンチロールモーメントの配分を応答性に基づいて制御する。
(もっと読む)
車両用サスペンション装置
【課題】車体の姿勢変化を抑えることが可能な車両用サスペンション装置を提供する。
【解決手段】(A)2つの車輪14の各々に対応して設けられ、それぞれが、可動部86を有し、2つの車輪14のうちの自身に対応するものの車体に対する上下方向の動作を、2つの車輪14の並ぶ方向における可動部86の動作に変換するものであり、2つの車輪14の同じ向きの動作を可動部86の互いに反対方向の動作に変換するように構成された2つの動作変換機構100と、(B)2つの可動部86に対して、(a)それらの間隔を標準状態における間隔である標準間隔に復帰させるための復帰力と、(b)2つの可動部86の間隔が変化するような相対動作を減衰させるための減衰力との少なくとも一方を付与する対可動部力付与装置120とを備えさせる。
(もっと読む)
車両状態制御装置及びその方法
【課題】転舵輪の転舵角と車両の傾動とを適切に協調させる。
【解決手段】車両状態制御装置は、車輪を転舵させる運転者の運転操作に応じてロール方向に車体を傾動させる車体傾動部20と、車輪を転舵させる運転者の運転操作量に対する車輪の転舵角を調整する舵角調整部44と、車輪の転舵角を検出する操舵角検出部43と、操舵角検出部43が検出した車輪の転舵角の増加に基づいて、車体の傾動の可変範囲の最大値を小さくする制御部2と、を備える。
(もっと読む)
車両のローリング挙動制御装置
【課題】構成物の横変位により操舵時のローリング挙動を抑制する際、横変位の反作用によって、操舵に伴うローリング挙動が許容限界を超えることのないようにする。
【解決手段】ローリング制御用可動構成物の横変位量制御が開始されたとき、先ず車両状態検出部21で操舵角θ、車輪速ω、ヨーレートΦ、前後加速度αxT、横加速度αyT、およびモータ回転角φを検出する。次に、可動構成物変位量目標値算出部22で、上記の操舵角θおよび車輪速ωを用い、操舵周波数が高いほど小さくなるような可動構成物のローリング挙動変化抑制用目標横変位量を演算する。その後可動構成物駆動部23で、上記可動構成物の目標横変位量と、上記ヨーレートΦ、前後加速度αxT、横加速度αyT、およびモータ回転角φとから、可動構成物の目標横変位量を実現するのに必要なモータ駆動トルク指令値を算出し、これをモータ用サーボドライバへ出力する。
(もっと読む)
車両運動制御装置
【課題】 車両に発生するヨーモーメントを抑制し、車両の操縦安定性の向上を図ることができる車両運動制御装置を提供する。
【解決手段】 車両運動制御装置1の取得部26は、車両の操縦安定性の低下の原因であるキングピン軸モーメントを取得する。また、算出部27は、キングピン軸モーメントを打ち消す反キングピン軸モーメント発生させるような左右前輪の接地荷重量を算出する。さらに、前輪接地荷重制御部31は、この接地荷重量に基づいて左右前輪のアクティブスタビライザを制御する。これにより、車両に発生するキングピン軸モーメントを抑制することができるので、車両の操縦安定性の向上を図ることが可能となる。
(もっと読む)
走行車両
【課題】 旋回時にキャンバ角を生じさせ、旋回動作を実行する少なくとも一対の車輪で走行する車両の前照灯の照射方向を調節することができる走行車両を提供する。
【解決手段】 前照灯を有する前照灯部91と、前照灯部91に設けた被駆動部91aと、前照灯部91を回動可能に軸支する回動軸92と、回動軸を支持する支持部材93と、支持部材93と上部リンク31とを同期して作動するように連結する支持部材連結手段94と、下部リンク32に連結され、被駆動部91aと駆動連結する駆動部材95と、を備えたことを特徴とする。
(もっと読む)
1 - 10 / 27
[ Back to top ]