
国際特許分類[B60G23/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両懸架装置 (7,837) | 車輪前方の粗面度の自動検出手段,またはそれによって車輪を上下に動かす自動上下運動手段をもつ車輪懸架装置 (10)
国際特許分類[B60G23/00]に分類される特許
1 - 10 / 10
アクチュエータの作動制御装置
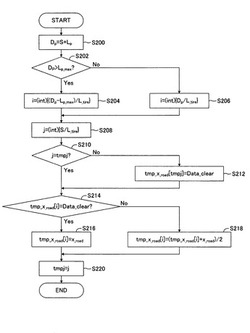
【課題】 プレビュー制御の制御性能の悪化が抑えられるアクチュエータの作動制御装置を提供すること。
【解決手段】 プレビューセンサ63によりセンサ距離z_ssrが検出されたときに検出の対象とされた路面位置を表すプレビュー位置Dpに基づいて、そのプレビュー位置Dpにおける路面変位量x_roadを記憶するためのデータ記憶位置iが演算される。そして、RAM54の記憶領域541のうち演算されたデータ記憶位置iにより表される記憶場所に路面変位量x_roadが記録される。
(もっと読む)
車両のアクティブ懸架システムを制御するための診断ユニットを備える制御装置

本発明は、複数の制御可能なばね又はダンパユニットを備える車両のアクティブシャシシステムを制御するための制御装置に関する。道路センサは、車両の走行方向前方の道路からセンサデータを生成し、前記道路センサは道路プロファイル(hL)を決定するために使用される。パイロット制御ユニット(24)は、決定された道路プロファイル(hL)に従ってパイロット制御変数を決定し、前記パイロット制御変数を使用して、ばね又はダンパユニットの調整を、決定された道路プロファイル(hL)に適合させる。道路プロファイルを表す変数(hL,hk)と、車両の現在状態を表す変数(r,r’,z,z’)とに基づき、車両の予想される状態(rM,rM’,zM,zM’)と車両の実際の現在状態(r,r’,z,z’)との間の偏差(A)を決定する診断ユニット(50)が設けられる。 (もっと読む)
自動車のアクティブシャシのバネ力特性を制御する装置及び方法
本発明は、自動車のアクティブシャシのバネ力特性を制御する装置及び方法であって、作動装置(16i)を制御することによりホイールスプリング装置(15i)のバネ力特性を変更できる、車体と車輪キャリアとの間に配置されたホイールスプリング装置(15i)と、自動車の前方の経路の垂直断面を反映する予測変数(hi)を検出するためのセンサ(21)と、ホイールスプリング装置(15i)のバネ力特性が自動車の前方の経路の垂直断面の形状に対して予測的に調節されるように検出された予測変数(hi)に基づいて、作動装置(16i)を制御する制御装置(22)を有する装置及び方法に関する。 (もっと読む)
車両のアクティブシャシシステムを制御するための制御装置
本発明は、複数の制御可能なばね又はダンパユニットを備える車両のアクティブシャシシステムを制御するための制御装置に関する。道路センサ(21)は、車両の走行方向前方の道路からセンサデータ(d)を生成し、センサデータは、道路プロファイル(hL)を決定するために使用される。パイロット制御ユニット(24)が、決定された道路プロファイル(hL)に従ってパイロット制御変数(yP、zP)を決定し、このパイロット制御変数を使用して、ばね又はダンパユニットの調整を、決定された道路プロファイル(hL)に適合させることができる。制御用の入力信号が、パイロット制御変数に基づき計算され、前記制御は、車両の車体の位置を制御するために使用される。 (もっと読む)
制御装置及び車両
【課題】構造の複雑化を抑制しつつ、路面段差通過時の乗り心地の向上を図ることができる制御装置及び車両を提供すること。
【解決手段】車輪2がキャスター角αを有して懸架されている。よって、車輪2へ付与される回転駆動力が増加(減少)されると、その増加(減少)により発生される変動力によって、懸架装置6が伸長(短縮)され、車高(車輪2と車体フレームBFとの間の距離)が高く(低く)される。これにより、路面の段差を通過する際に発生する車高変化に対し、その車高変化とは逆位相の車高変化を回転駆動力の増減により発生させることができるので、車両の姿勢を一定に維持して、乗り心地の向上を図ることができる。また、アクティブサスペンションによる姿勢制御のように、油圧源や油圧配管などを別途設ける必要がなく、その分、構造を簡素化することができるので、部品コストの削減や車両の軽量化を図ることができる。
(もっと読む)
底擦り回避補助装置
【課題】車両の底擦りの発生を事前に知ることができ、これを確実に回避することができるようにする。
【解決手段】地図データ入力部1から入力した自車両周辺の地図データからデータ抽出部2で地面形状データAを抽出し、データ取得部3で自車両周辺の特徴点の位置データBを取得する。また、カメラ部4で得られた自車両周辺の画像から、抽出部6と算出部7とにより、特徴点の位置データCを求める。そして、位置袷部8で特徴点の位置データB,Cを一致させる座標変換のパラメータを求め、このパラメータを用いて、座標変換部9により、地面形状データAを自車両の座標系の地面形状データDを求める。この地面形状データDと自車両形状データ入力部1からの自車両形状データを基に、底擦り判定部10で自車両が底擦りするか否かを判定し、この結果を出力部12に与える。
(もっと読む)
車両の挙動制御装置
【課題】車両の挙動を変更可能なアクチュエータを道路特性情報に応じた適切な制御タイミングで作動させる。
【解決手段】ナビゲーションECU11は、検出された自車両の現在位置と、記憶装置14に記憶されている進行先の凹凸路の開始位置間の距離が所定距離L0となった時点からの車両の走行距離L1を計算する。また、ECU11は、実際に走行した前後方向距離に対する距離の誤差の総和である自車位置のばらつき距離L3を計算し、アクチュエータ21eの作動応答遅れ時間T0内に車両が走行する距離である応答距離L4を計算する。そして、ECU11は、所定距離L0からばらつき距離L3および応答距離L4等を減算した値である残存距離L1*と、走行距離L1とを比較して、走行距離L1が残存距離L1*より大きくなったとき、アクチュエータ21eの事前制御開始情報をサスペンションECU23に供給する。
(もっと読む)
車両乗上制御システム及び車両乗上制御方法
【課題】車輪が段差部に乗り上げた際に確実に突上げ感を小さくすることができるようにする。
【解決手段】道路における段差部を認識する段差部認識処理手段と、車両の予想走行軌跡を算出する予想走行軌跡算出処理手段と、予想走行軌跡に基づいて車輪の段差部への乗上げが予測されるかどうかを判断する乗上判定処理手段と、車輪の段差部への乗上げが予測される場合に、車両支持機構の動作を制御する車両支持機構制御処理手段とを有する。予想走行軌跡に基づいて車輪の段差部への乗上げが予測されるかどうかが判断され、乗上げが予測される場合に、車両支持機構の動作が制御されるので、車輪が段差部に乗り上げた際に確実に突上げ感を小さくすることができる。
(もっと読む)
段差学習システム
【課題】検出された複数の段差エリアを間隔が短い場合には結合して単一の段差エリアとし、また、段差エリアが検出された場合に同一地点判定を行って、同一地点についてのデータを再度記憶しないようにして、記憶容量を削減することができ、段差に対して適切にサスペンション制御を行うことができるようにする。
【解決手段】道路の段差を検出する段差検出手段と、該段差検出手段が検出した段差エリアの段差情報を記憶する記憶手段と、該記憶手段に記憶されている段差エリアの段差情報と、前記段差検出手段が検出した段差エリアの段差情報とを比較する比較手段と、該比較手段による比較結果に基づいて、前記段差検出手段が検出した段差エリアの段差情報を前記記憶手段に記憶させる記憶処理手段とを有する。
(もっと読む)
段差学習システム
【課題】段差エリアが検出された場合であっても、段差を学習するのに相応しくない状況においては学習しないようにして、車両の走行安定性や乗り心地が低下することがなく、段差に対して適切にサスペンション制御を行うことができるようにする。
【解決手段】道路の段差を検出する段差検出手段と、該段差検出手段が検出した段差エリアの段差情報を記憶する記憶手段と、車両の走行状況を判定する判定手段と、該判定手段による判定結果に基づいて、前記段差検出手段が検出した段差エリアの段差情報を前記記憶手段に選択的に記憶させる記憶処理手段とを有する。
(もっと読む)
1 - 10 / 10
[ Back to top ]