
国際特許分類[B60R1/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 光学的視認装置 (5,484)
国際特許分類[B60R1/00]の下位に属する分類
後視鏡装置 (1,382)
前視鏡装置;展望鏡装置 (10)
他の物品と組合っている鏡体,例.時計付 (312)
国際特許分類[B60R1/00]に分類される特許
31 - 40 / 3,780
車両周辺監視装置
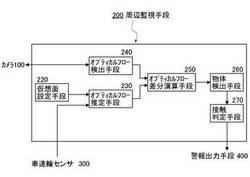
【課題】物体が存在しない場所で、誤ってオプティカルフローを検出することのない車両周辺監視装置を提供する。
【解決手段】カメラ(撮像手段)100で異なる時刻に撮像した2つの画像に基づいて、オプティカルフロー検出手段240が第1のオプティカルフロー(F1)を検出し、オプティカルフロー推定手段230が、仮想面設定手段220によって路面から所定距離だけ高い位置に設定された第1の仮想面の上に生じる第2のオプティカルフロー(F2)を推定して、オプティカルフロー差分演算手段250が、F1からF2を差し引いて、物体検出手段260が、差分演算結果に基づいて車両の周辺に存在する物体を検出し、接触判定手段270が、物体が車両10に接触する可能性があると判定したときに、警報出力手段400が警報を出力する。
(もっと読む)
車線判別装置

【課題】登坂車線を簡易に且つ確実に判別することができる車線判別装置を提供する。
【解決手段】車両2に搭載される車線判別装置であって、車両2の走行中に走行する道路上の車線境界線を含む車両2の前方の画像を所定期間連続して取得する画像取得手部30と、連続する画像の各画像内に同一の車線境界線が存在するか否かを判定する境界線判定部43と、同一の車線境界線が存在すると境界線判定部43が判定した場合、画像の車線境界線上において画像濃度が所定値以上変化する点を車線境界線のエッジ点として画像毎に抽出するエッジ点抽出部44と、抽出された車線境界線のエッジ点の数を画像毎に集計する集計部45と、連続する画像において、集計したエッジ点の数の所定期間における周期的な変化に基づいて、車線境界線が登坂車線と走行車線との車線境界線であるか否かを判別する境界線判別部46と、を備える。
(もっと読む)
目的走行位置設定装置及び操舵制御システム
【課題】走行中の周囲の状況の変化に応じた好適な位置に目標走行位置を設定し、設定した目標走行位置で車両を走行させる。
【解決手段】操舵制御システム1のCPU16は、接近車両の有無に応じて目標走行位置を設定し、車両2が現在の走行位置から目標走行位置へ走行するために必要な操舵トルクを発生するようにモータ9を駆動する。目標走行位置は、左側の接近車両及び右側の接近車両がともに検出されない場合には、車線の幅方向の中央の標準位置に設定され、左側の接近車両のみが検出された場合には、標準位置よりも右側の右偏向位置に設定され、右側の接近車両のみが検出された場合には、標準位置よりも左側の左偏向位置に設定され、左側の接近車両及び右側の接近車両がともに検出された場合には、左側の接近車両と右側の接近車両との中間位置に設定される。
(もっと読む)
車両周辺監視装置
【課題】俯瞰画像上で全体が表示されていない目標物に対し、俯瞰画像上の境界線を変更し全体を表示できるようにした車両周辺監視装置を提供すること。
【解決手段】複数の撮像装置が互いに共通する視野領域とする俯瞰画像の共通領域に位置する障害物と判定された画像から抽出された複数の特徴点に対し、三次元計測処理部43において得られた相対運動情報による一定の経過時間を想定したときの予想軌跡と時刻変化をもとに、前記共通領域を互いに共通する視野領域とする各カメラについて“前記特徴点が写る/写らない”を予測しその予測結果を得る。そして、前記予測結果から、前記俯瞰画像の共通領域について、前記特徴点が抽出された障害物131をより広範囲に写すことの可能なカメラによる部分俯瞰画像を優先させ、フィードフォワード的に俯瞰画像の繋ぎ目、境界線を変更し、障害物131がより広範囲に俯瞰画像に表示されるようにする。
(もっと読む)
車両周辺監視装置
【課題】本発明は、画像認識における誤検出、あるいは、不検出の発生時、発生要因のデータを学習し、誤検出や不検出を繰り返さず、認識精度を向上することができる車両周辺監視装置を提供する。
【解決手段】撮影手段1で入力された画像に対して、対象物検出処理部3によって検出された対象物について、誤検出、あるいは、不検出の場合、ユーザ入力手段6により出力手段7上で該当領域を指定する。画像認識DB修正部4は、誤検出領域の辞書データを修正し、修正したデータを画像認識DB5の辞書データに格納する。
(もっと読む)
車両認識装置、車両認識方法、プログラム
【課題】背景画像を抽出することなく、先行車両や対向車両の認識率を向上させることができる車両認識装置を提供すること。
【解決手段】撮影手段50が撮影した画像データからs偏光画像及びp偏光画像を作成する偏光画像作成手段101,102と、前記撮影手段が撮影した画像データから輝度画像を作成する輝度画像作成手段103と、s偏光画像及びp偏光画像から、路面に反射した車両ライトの画素領域を検出する反射領域検出手段104と、前記画素領域を車両認識の認識対象から除外した前記輝度画像から、前方の車両の光源を認識する車両認識手段105と、を有する車両認識装置100を提供する。
(もっと読む)
運転支援装置
【課題】車輪の縁石への接触もしくは側溝への脱輪の発生するおそれがある場合の警告にステアリングの操舵力制御を用いることで、車輪の縁石への接触や側溝への脱輪を効果的に抑制する。
【解決手段】撮像手段13、14と、障害物検出手段15と、距離算出手段16とを備えた運転支援装置12において、車輪速検出手段19と、操舵角検出手段20と、操舵制御手段21と、検出された車輪速と検出された操舵角とから車輪の進路を予測する進路予測手段22と、縁石または側溝が検出された場合、予測された車輪の進路と算出された縁石または側溝と車輪との距離とに基づいて車輪が縁石または側溝に予め設定された時間内に到達するかどうかを判定する判定手段23と、車輪が縁石または側溝に予め設定された時間内に到達すると判定された時には操舵反力を大きくする制御装置18とを備えることを特徴とする。
(もっと読む)
駐車支援装置
【課題】運転者が自車両の切り返しの有無を含めた駐車の可否や難易度を直感的に判断することができる駐車支援装置を提供する。
【解決手段】少なくとも自車両後方の撮像映像を取得する映像取得手段9と、この映像取得手段9が取得した撮像映像に自車両の駐車目安枠を重畳して合成映像を表示手段3に出力する画像重畳部13とを備え、画像重畳部13に重畳される自車両の駐車目安枠は、駐車可能な限界領域を示す第1の目安枠と、この第1の目安枠から自車両の進行方向側に延出して駐車の際に自車両の切り返しが必要な領域を示す第2の目安枠とを有することを特徴とする。
(もっと読む)
画像処理装置及び方法、並びに電子機器
【課題】ドライブレコーダー等において用いられる画像処理装置において、ハイダイナミックレンジ合成によって白とびや黒つぶれの少ない画像を得る一方、画像の不自然さや擬似輪郭等を回避して、記録される画像の画質を改善する。
【解決手段】この画像処理装置は、異なる露光量で撮影対象を撮影することにより得られる複数の画像を表す画像データを取得する画像データ取得部と、複数の画像を表す画像データを合成することにより、ダイナミックレンジが拡張された1つの画像を表す合成画像データを生成するダイナミックレンジ拡張部と、選択信号に従って、複数の画像の内の1つを表す画像データと合成画像データとの内の一方を選択し、選択された画像データを出力する画像選択部と、複数の画像の内の1つを表す画像データについて輝度レベルを評価し、評価結果に従って選択信号を生成する画像評価部とを含む。
(もっと読む)
車両周囲監視システム
【課題】車両の周囲の撮像画像を表示させる車両周囲監視システムにおいて、被牽引車を他の被牽引車に変更する際に容易に被牽引車の周囲の監視を開始できるようにする。
【解決手段】ワイヤレス画像転送システム1においては、被牽引車に、この車両の周囲を撮像する撮像素子11と、カメラ制御部14による撮像画像を含むデータをアンテナ42から無線送信する送信無線通信部13と、を備え、牽引車に、撮像画像を表示する表示装置30と、無線送信された撮像画像を含むデータをアンテナ46で受信して撮像画像を表示装置30に送る受信装置20と、を備えている。この構成では、撮像素子11と表示装置30との間の配線を無線化することができるので、牽引車と被牽引車との間に配線を敷設する必要がない。よって、被牽引車を他の被牽引車に変更する際に容易に被牽引車の周囲の監視を開始することができる。
(もっと読む)
31 - 40 / 3,780
[ Back to top ]