
国際特許分類[B60R1/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 光学的視認装置 (5,484)
国際特許分類[B60R1/00]の下位に属する分類
後視鏡装置 (1,382)
前視鏡装置;展望鏡装置 (10)
他の物品と組合っている鏡体,例.時計付 (312)
国際特許分類[B60R1/00]に分類される特許
41 - 50 / 3,780
車線監視システム及び車線監視方法
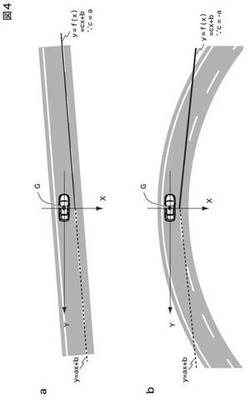
【課題】車載カメラで撮影した自動車後方の画像に基づいて行う自動車前方の車線認識の処理の負荷を軽減できる「車線監視システム及び車線監視方法」を提供する。
【解決手段】後方カメラ1で撮影した自動車後方の画像フレーム中の白線を直線に近似する。自動車がカーブを走行していない場合には、近似した直線を自動車前方の白線として認識し、自動車がカーブを走行している場合には、自車の中心を通る左右方向軸を対象軸として、近似した直線と線対称な直線を求め、求めた直線を自動車前方の白線として認識する。
(もっと読む)
車載用のカメラ装置

【課題】撮影画像の異なる領域について同時に焦点を合わせることができる車載用のカメラ装置を提供する。
【解決手段】車載用のカメラ装置は、画像を撮影する撮像素子101と、前記撮像素子101により撮影する画像の上下方向の一方向において複数の段階で焦点を異ならせる1つ以上のレンズ(図示の例では、レンズ102、レンズ103)を有するレンズ部と、を備えたことを特徴とする。前記レンズ部は、2つ以上のレンズ(図示の例では、レンズ102、レンズ103)を有し、前記複数の段階のそれぞれで撮影対象からの光が通過するレンズの数を異ならせて、焦点を異ならせる、ことを特徴とする。
(もっと読む)
障害物通知システムおよび障害物通知方法
【課題】車両の運転者に、障害物までの距離を直感的に伝えることができる障害物通知システムを提供する。
【解決手段】車両が有する座席の着座面の位置を変位させる機構と、自車両周辺の障害物と自車両との距離情報を取得する障害物検知手段と、前記取得された距離情報から、前記機構の駆動方法を決定する制御命令決定手段と、を有することを特徴とする。また、前記制御命令決定手段は、自車両と障害物との距離が近くなるに従って前記着座面の初期位置からの変位量を大きくし、もしくは、所定の時間ごとに前記着座面を動揺させる制御を行い、障害物との距離に応じて前記所定の時間を短くすることで、障害物との距離を運転者に伝達することが好ましい。また、前記制御命令決定手段は、障害物が位置する方向もしくは車両の進行方向に前記着座面を変位させる制御を行ってもよい。
(もっと読む)
車両周囲監視システム
【課題】車両の周囲の撮像画像を表示させる車両周囲監視システムにおいて、被牽引車を他の被牽引車に変更する際に容易に被牽引車の周囲の監視を開始できるようにする。
【解決手段】ワイヤレス画像転送システム1においては、被牽引車に、この車両の周囲を撮像する撮像素子11と、カメラ制御部14による撮像画像を含むデータをアンテナ42から無線送信する送信無線通信部13と、を備え、牽引車に、撮像画像を表示する表示装置30と、無線送信された撮像画像を含むデータをアンテナ46で受信して撮像画像を表示装置30に送る受信装置20と、を備えている。この構成では、撮像素子11と表示装置30との間の配線を無線化することができるので、牽引車と被牽引車との間に配線を敷設する必要がない。よって、被牽引車を他の被牽引車に変更する際に容易に被牽引車の周囲の監視を開始することができる。
(もっと読む)
不審者検知装置、不審者検知方法およびプログラム
【課題】カメラ画像から不審者を自動的に検知する。
【解決手段】不審者検知装置は、撮影手段と、撮影手段によって撮影された画像から人物を抽出する画像解析手段と、抽出された人物の行動特徴量を所定時間おきに算出し、行動特徴量の度数分布を求める度数分布解析手段と、前記度数分布解析手段によって求められた行動特徴量の度数分布に基づいて、抽出された人物が不審者であるか否かを判定する判定手段と、を備える。行動特徴量としては、移動速度、移動方向の変動量、所定の対象物との間の距離、頭の高さを例示できる。正常行動と不審行動についての行動特徴量度数分布をあらかじめ記憶しておき、これと画像から得られた行動特徴量度数分布を比較することで不審者を検知する。あるいは、画像から得られた行動特徴量度数分布のばらつきに基づいて不審者を検知することもできる。
(もっと読む)
ステレオ撮像装置
【課題】輝度差が大きい場面で、撮像する全フレームにおいて、視差画像を含む視差情報を得ることができるステレオ撮像装置を提供することである。
【解決手段】第1の画像と第1の画像と露光時間が異なる第2の画像を取得する画像取得部と、取得した第1の画像及び第2の画像の一方の画像に輝度補正を行うゲイン・オフセット補正部102と、輝度補正部で補正された一方の画像と他方の画像から視差を計算し、視差画像及び視差情報を出力する視差計算部103と、取得した第1の画像及び第2の画像を合成して合成画像を生成し、出力する合成画像生成部105と、を備える。
(もっと読む)
車両の運転支援装置
【課題】車両の後側方の撮像画像を、横方向に変化する倍率で拡大又は圧縮してなる画像を表示器に表示させる場合に、自車両の前後方向に延在するはずの白線等の走行領域区分線が表示器に表示される画像中で曲がって表示されるのを防止する。
【解決手段】車両2の後側方を撮像するカメラ3の撮像画像から表示器5に表示させる表示用画像を生成する表示用画像生成手段7は、設定された横方向拡縮倍率で撮像画像の各部を横方向にスケール修正する横スケール修正処理と、この横スケール修正処理により撮像画像から生成される横スケール修正画像中で曲がって表示される走行領域区分線21の画像が直線状に延在する画像になるように設定された縦方向拡縮倍率で横スケール修正画像を部分的に縦方向にスケール修正する縦スケール修正処理とを実行することにより、表示用画像を生成する。
(もっと読む)
衝突回避システム
【課題】後続車両の衝突を確実に防止することができる衝突回避システムを提供する。
【解決手段】 衝突する危険度が小さいものでなくなった場合(S23:NO)、後続車両が自車両に衝突する危険度を算出し(S40)、この危険度が大きくなった時に、自車両に対して先行する先行車両に回避方向及び回避距離に関する情報を送信して(S25、S30)、自車両だけでなく先行車両をも回避させて(S31、S67)、後続車両が自車両に追突することを防止している。このとき、自車両と先行車両で構成する車列の側方に回避スペースを形成するとともに、各車両の車間を詰めさせて、自車両の後方にも回避スペースを形成している。このため、自車両だけで回避制御を行っていた従来の衝突回避システムと比べ、この衝突回避システムを用いると、後続車両の衝突をより確実に防止することができる。
(もっと読む)
表示装置及び表示方法
【課題】照射領域のサイズが限られている場合であっても、指示地点までの進行方向を運
転者に示すことができる表示装置及び表示方法を提供する。
【解決手段】設定部は、運転者に指示すべき指示地点を設定する。判定部は、乗り物が指
示地点に接近した場合、指示地点を示すべき指標画像を表示領域内に表示することが可能
であるか否かを判定する。生成部は、表示することが可能である場合は、指示地点まで向
かって移動する指標画像を生成し、表示することが可能でない場合は、指標画像に付帯す
る付帯画像であって、表示領域外で指標画像が示しているであろう位置を、運転者に認識
させるための付帯画像を生成する。
(もっと読む)
車両の運転支援装置
【課題】運転者が車両の前方の状況を確認し易いようにカメラの撮像画像を運転者に対して表示することができる車両の運転支援装置を提供する。
【解決手段】運転支援装置1は、カメラ3aの撮像画像を表示する表示手段4,7と、所定の条件が成立する場合にカメラ3aの撮像画像から運転者の注意を喚起すべき対象物を検出し、対象物を検出した場合に運転者の注意を喚起するための処理を実行する注意喚起処理手段8とを備える。カメラ3aの撮像画像の表示モードは、撮像画像の一部の領域(小画角領域)を拡大して表示する小画角領域表示モードと、小画角領域を含む広角領域を表示する広角領域表示モードとがある。表示手段4,7は、前記所定の条件が成立する場合には、小画角領域表示モードにて撮像画像を表示し、前記所定の条件が成立しない場合には、広角領域表示モードにて撮像画像を表示する。
(もっと読む)
41 - 50 / 3,780
[ Back to top ]