
国際特許分類[B60R1/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 光学的視認装置 (5,484)
国際特許分類[B60R1/00]の下位に属する分類
後視鏡装置 (1,382)
前視鏡装置;展望鏡装置 (10)
他の物品と組合っている鏡体,例.時計付 (312)
国際特許分類[B60R1/00]に分類される特許
61 - 70 / 3,780
俯瞰画像表示装置
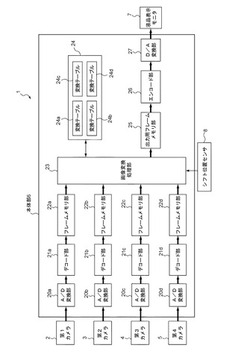
【課題】車両から離れるに従って対象物が伸びて太くなる変形画像が俯瞰画像に表示されてしまうことを防止すること。
【解決手段】俯瞰画像表示装置1の画像変換手段23は、撮影手段2〜5により撮影された画像を、変換データ記録手段24に記録される変換データ24a〜24dに基づいて、左側円柱投影面と、右側円柱投影面と、前側円柱投影面と、後側円柱投影面と、左前球体投影面と、右前球体投影面と、左後球体投影面と、右後球体投影面と、地面投影面とにより構成される俯瞰画像に変換し、表示手段7に表示させる。
(もっと読む)
携帯端末装置

【課題】ユーザの操作や特定の環境を走行することなく、精度良く外界状況を認識することのできる携帯端末装置を提供する。
【解決手段】運転支援システムに用いられる携帯端末装置1において、後方カメラ3の車室内の画像に基づき予め複数定められた車室内の特徴部を抽出するための特徴部情報と、各特徴部の位置情報と、携帯端末装置1の設置位置と設置角度に関する予め定められた基準位置情報とを、車種毎に記憶する記憶手段4と、記憶された特徴部情報と後方カメラ3の画像情報とに基づいて、各特徴部の位置を導出する導出手段5と、導出された各特徴部の位置と各特徴部の位置情報とを照合する照合手段6と、照合結果から携帯端末装置1の実設置位置および実設置角度を算出する算出手段7と、前方カメラ2による外界認識結果を補正する補正手段8とを備え、補正手段8は、基準位置情報に対する実設置位置および実設置角度のずれ量に応じて前方カメラ2の外界認識結果を補正する。
(もっと読む)
運転支援装置
【課題】車両近傍の物体検出を精度よく行うことができる運転支援装置を提供することを目的とする。
【解決手段】本発明の運転支援装置は、車両周囲を撮像する撮像カメラ10と、車両周囲に照射光を発するLED23と、反射光を取得する第2の撮像素子21と、反射光に基づいて距離画像を算出する第2の信号処理部22と、距離画像から物体を検出する物体検出処理部36とを備える。そして、第2の信号処理部22が算出した距離画像のうち物体検出処理部36が検出した物体を示す画像を撮像カメラ10が撮像した撮像画像に合成する合成手段37と、この合成手段37が合成した合成画像を表示する表示装置40を備えたことを特徴とする。
(もっと読む)
車載カメラシステム及び画像表示装置
【課題】 車両のバッテリを無駄に消耗させることなく、車両を後退させる際に、リアカメラにより撮影した後方画像を速やかに表示させる。
【解決手段】 ドライブモード又はパーキングモードが選択されたとき、選択されたモードを示すモード信号を受信するモード信号受信部と、ドライブモードが選択されたことを示すモード信号に次いで、パーキングモードが選択されたことを示すモード信号を受信した場合に、ドライブモードからパーキングモードへのモード切替状態を示すモード切替データを記憶するモード切替データ記憶部と、車両のエンジン始動信号を受信するエンジン始動信号受信部と、エンジン始動信号を受信したとき、モード切替データ記憶部にモード切替データが記憶されている場合、カメラをオン状態に設定し、カメラにより撮影された後方画像を表示部に表示させる制御を行う制御部とを備える。
(もっと読む)
車輌用情報呈示装置
【課題】運転者がドアミラーへの視線誘導を伴わずに後側方からの他車輌の接近を認識することが可能な車輌用情報呈示装置を提供する。
【解決手段】車輌用情報呈示装置10は、相対距離Diを検出する他車輌検出センサ11と、中時間周波数成分及び低空間周波数成分からなる視覚パターン20を生成するパターン生成装置14と、運転者の周辺視野に視覚パターン20を呈示する表示ディスプレイ15と、を備え、視覚パターン20は、自車輌1を示す自車輌発光体21と、他車輌を示し、第1の運動を行う他車輌発光体22と、自車輌発光体21と他車輌発光体22との間に配置され、第2の運動を行う複数の中間発光体23と、を有し、パターン生成装置14は、相対距離Diが短くなるほど、他車輌発光体22が自車輌発光体21の下方から所定軌道に沿って移動して自車輌発光体21の側方に近づくように、視覚パターン20を変化させる。
(もっと読む)
車輌用情報呈示装置
【課題】運転者が視線誘導を伴わずに物体への接近を認識することが可能な車輌用情報表示装置を提供する。
【解決手段】左側方に存在する物体との第1の距離と、右側方に存在する物体との第2の距離と、を検出する物体検出センサ11,12及び距離演算装置15と、第1の距離に対応して変化する第1の視覚パターン21と、第2の距離に対応して変化する第2の視覚パターン22と、を生成するパターン生成装置16と、運転者側ドアの内側から自動車1の略中心C0までの間に設けられ、第1及び第2の視覚パターン21,22を運転者30の周辺視野に呈示する表示ディスプレイ17と、を備えており、第1及び第2の視覚パターン21,22はいずれも中時間周波数成分及び低空間周波数成分からなり、運転者30を中心として左右に位置するように、表示ディスプレイ17に呈示される。
(もっと読む)
カメラレンズ用ワイパー
【課題】車載用カメラのレンズに付着した付着物を適切に除去することが可能な小型のカメラレンズ用ワイパーを提供する。
【解決手段】カメラレンズ用ワイパー10は、車外に露出した車載カメラ50のレンズ51の付着物を除去する拭取部11と、当該拭取部11を駆動する高分子アクチュエータ12と、当該高分子アクチュエータ12に駆動信号を入力する信号入力部13と、を備える。
(もっと読む)
コーナー検出装置
【課題】 撮像状況によって分離して抽出された2つのエッジ間に存在するコーナーを検出できるコーナー検出装置を提供する。
【解決手段】 車両に搭載し、周囲環境を画像として撮像するカメラ1と、撮像された画像に対し、2方向以上の直線エッジ成分を抽出するエッジ抽出部3と、各エッジを構成する画素に対して、エッジの直交方向の速度であるフローを算出するフロー算出部4と、エッジ端をエッジ方向(エッジの延びる方向)に延長するエッジ延長部5と、延長されたエッジに基づき、方向の異なるエッジ同士の交点をコーナーとして判別するコーナー判別部6と、を備え、エッジ延長部5は、延長した先に同じ大きさを有するフローが存在する場合、延長を有効と見なして再線化する。
(もっと読む)
作業機の周囲監視装置
【課題】作業機の周囲の状況を正確且つ良好な視認性で監視して、作業機の安全性や作業効率を向上させることを目的とする。
【解決手段】上部旋回体5に複数台が設けられ、そのうち2台が相互に視野範囲を部分的に重複するように設けた複数台のカメラと、各カメラで取得したカメラ画像に基づいて上方視点となるように視点変換した仮想視点画像を生成する視点変換部23と、視点変換部23が生成した複数の仮想視点画像をそれぞれに対応した表示領域に表示するように合成した合成画像を生成する画像合成部24と、合成画像を第1の画像として、各カメラのうち何れか1つのカメラが撮影している画像であり仮想視点画像間の境界線を視野内に含む画像を第2の画像として、第1の画像と第2の画像とを含む表示画像を生成する表示画像生成部25と、表示画像を画面上に表示するモニタ14と、を備えている。
(もっと読む)
車両周辺表示装置
【課題】
表示を切り替えることなく、一般色覚者及び色弱者の双方が車両からの距離感
を確実に掴むことができる周辺表示装置を提供する。
【解決手段】 本発明の車両周辺表示装置1は、カメラ17により撮影された車両周辺の映像と、車両から所定距離離間した位置を示す距離目安線22を、車内に設けられた表示器13に重畳して表示する。距離目安線22は、距離目安線本体22aと、距離目安線本体22aに沿って表示される付加部22b、22cとを備えている。
(もっと読む)
61 - 70 / 3,780
[ Back to top ]