
国際特許分類[B60R1/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 光学的視認装置 (5,484)
国際特許分類[B60R1/00]の下位に属する分類
後視鏡装置 (1,382)
前視鏡装置;展望鏡装置 (10)
他の物品と組合っている鏡体,例.時計付 (312)
国際特許分類[B60R1/00]に分類される特許
1 - 10 / 3,780
車輌案内装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
車両用表示システム
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
画像処理装置及び画像処理方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
駐車支援装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
画像処理装置、撮像方法、プログラムおよび車両
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
車両用画像表示装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
画像処理システム、画像処理システムを備えた車両、画像処理方法及びプログラム
【課題】低い消費電力や、安全性の向上を実現できるとともに、異物検出用のフレームの挿入によるセンシング用のフレームレートの低下を抑えることが可能な画像処理システム、画像処理システムを備えた車両、画像処理方法及びプログラムを提供する。
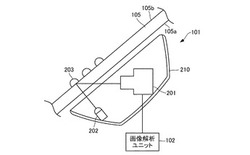
【解決手段】フロントガラス105に向けて光を照射する光源202と、フロントガラス105に付着した雨滴203によって反射された光源202からの光、及び、車両外部からフロントガラス105を透過した光を撮像する撮像装置201と、撮像装置201で撮像された撮像画像データを解析する画像解析ユニット102と、を備え、撮像画像データは、雨滴検出用のフレーム及び車両周辺情報検出用のフレームからなり、画像解析ユニット102は、撮像装置201における雨滴検出用のフレームの読み出し規則を、車両周辺情報検出用のフレームの読み出し規則と異ならせる。
(もっと読む)
衝突検出装置

【課題】路上に存在する障害物を迅速かつ適切に識別することができる衝突検出装置を提供する。
【解決手段】車両Aに搭載された、車両前方を撮影する撮影手段10と、撮影手段10によって撮影された画像に基づいて路上に存在する対象物を検出する路上対象物検出手段20と、を備えており、路上対象物検出手段20は、撮影手段10によって撮影された画像に基づいて、対象物から車両Aまでの間隔を算出する距離算出部21と、撮影手段10によって撮影された画像において、対象物が立体物であるか平面標識であるかを判別する基準となる判別ラインを設定する判別ライン設定部22と、間隔が所定の距離となっている対象物について、判別ラインとの相対的な位置に基づいて立体物であるか平面標識であるかを判別する対象物判定部23と、を備えている。
(もっと読む)
車両周辺撮影装置および車両周辺画像の処理方法
【課題】高精度に車両周辺の障害物を検出することができる車両周辺撮影技術を提供する。
【解決手段】車両の周辺の情景を撮影する第1カメラと、第1カメラの撮影範囲と部分的に重複する撮影範囲を撮影する第2カメラと、が車両に搭載されている。第1カメラと第2カメラとの一方を主カメラとするとともに他方を副カメラとし、主カメラにより撮影された画像を主撮影画像とするとともに副カメラにより撮影された画像を副撮影画像とする。視点変換部13は、副撮影画像を主カメラの視点位置から撮影された画像に視点変換した視点変換画像を生成する。画像差分部14は、比較情報として主撮影画像と視点変換画像との差分画像を生成する。
(もっと読む)
俯瞰映像生成装置、俯瞰映像生成方法、映像表示システムおよびナビゲーション装置
【課題】撮像画像を俯瞰画像に変換する変換パラメータを簡易に調整できる俯瞰映像生成装置、俯瞰映像生成方法、映像表示システムおよびナビゲーション装置を提供する。
【解決手段】俯瞰変換部23が、画像を射影変換により俯瞰画像に変換する俯瞰パラメータを記憶する俯瞰パラメータ記憶部25から読み出した俯瞰パラメータを用いて、カメラ10により撮像された撮像画像を俯瞰画像に変換し、間隔指標算出部24bが、等間隔のパターンの標示が撮像された撮像画像を変換した俯瞰画像上で標示のパターンの間隔が揃う度合を示す間隔指標値を算出し、俯瞰パラメータ算出部24cが、算出された間隔指標値に基づいて、俯瞰画像上で標示のパターンの間隔が所定の範囲内で揃う俯瞰パラメータを算出して俯瞰パラメータ記憶部25に記憶する。
(もっと読む)
1 - 10 / 3,780
[ Back to top ]