
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
1,001 - 1,010 / 6,854
電気自動車
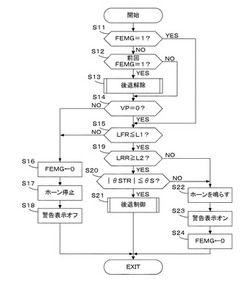
【課題】 前方車両が後退して自車両に接近してくるような場合に衝突を回避することができる電気自動車を提供する。
【解決手段】 自車両の停止状態が検出され、かつ前方障害物との距離LFRが第1所定距離L1以下で、かつ後方障害物との距離LRRが第2所定距離L2以上であり、かつステアリングホイールの操舵角θSTRの絶対値が所定舵角θS以下であるときに、自車両を低速で後退させるように制御する。前方車両が後退して自車両に接近してくるような場合に、運転者の意図しない方向へ自車両が後退することなく、後方障害物との衝突を回避しつつ前方車両との衝突を確実に回避することができる。
(もっと読む)
運転支援装置

【課題】渋滞をより緩和することが可能な運転支援装置を提供する。
【解決手段】本発明の一実施形態に係る運転支援装置1は、定常速度で走行するための運転支援装置において、直前車の発進とともに加速制御を行い、直前車を追従する追従制御手段23と、車速を直前車よりも小さくし、直前車との車間距離を次第に拡大する車間拡大制御手段24と、車速を直前車よりも大きくし、直前車との車間距離を次第に縮小する車間縮小制御手段25とを備える。
(もっと読む)
道路認識装置
【課題】車両前方の撮像画像中から車線や横断歩道をリアルタイムで検出可能であり、横断歩道までの距離や横断歩道の距離方向の幅を検出可能な道路認識装置を提供する。
【解決手段】道路認識装置1は、自車両前方を撮像する撮像手段2と、画像T上の水平ラインj上を探索して車線候補点cr、clを検出する車線検出手段10と、車線候補点crに対応する車線の横幅が横断歩道の横幅に相当する横幅であった場合には、当該水平ラインjの探索領域Slを拡大し、当該水平ラインj上で輝度の繰り返しパターンが存在するか否かを判断するパターン探索手段11と、繰り返しパターンが存在する各水平ラインjをグループ化するグループ化手段12とを備え、グループ化手段12は、グループ化したグループの最も手前側の位置までの距離Znearを横断歩道までの距離Zcとして算出し、グループの実空間上の距離方向の幅Wzを横断歩道の幅Wczとして算出する。
(もっと読む)
車線境界全般を検出する方法およびシステム
【課題】 車線区分線や道路境界などの路面標識が連続的でない場合、湾曲している場合、そのサイズが既知でない場合などにおいても、極端に大きな計算能力を必要とすることなく、効率的に路面標識を検出する方法、装置およびシステムを提供する。
【解決手段】 イメージャ(1)から、車両(2)の前方の道路(4)の画像(3)を受けるステップと、画像中に識別された道路内に、関心領域を決定するステップと、関心領域内に車線区分線(7L、7R)を検出することによって、また車線区分線を検出することができなかった場合には、関心領域内に道路境界を検出することによって、路面標識(8L、8R)を検出するステップとを含んでいる。ウィンカがオンの場合には、前記各ステップをスキップする。
(もっと読む)
車載装置および認知支援システム
【課題】車載装置のコスト低減を図るとともに、ドライバーの死角から自車両に接近する移動物体の検出漏れを防止しつつ、検出した移動物体の存在をドライバーに対して確実に認識させること。
【解決手段】歪曲した受光部により広角な範囲の映像を車載装置が撮像し、撮像された映像に基づいて撮像部の設置方向および設置方向以外の方向から自車両に接近する移動物体を車載装置が検出し、検出された移動物体と自車両とが衝突する可能性を示す衝突危険度を車載装置が判定し、判定された衝突危険度に応じて移動物体の存在を報知するように車載装置を構成する。
(もっと読む)
車線逸脱防止支援装置
【課題】自車両の左右いずれか一方の側にしか車線区画線を検出できない場合であっても、車線逸脱防止支援を正確に行うことができる車線逸脱防止支援装置の提供。
【解決手段】自車両の斜め前方を含む前方を撮像する撮像手段と、撮像手段により撮像された前方画像に基づき、車線区画線を検出する車線区画線検出手段と、車線区画線検出手段により検出された車線区画線と自車両の位置関係に基づき、自車両の車線逸脱防止を支援する支援手段と、車線区画線検出手段により左右いずれか一方にのみ車線区画線が検出された場合、検出された車線区画線と自車両との距離が所定値未満であるかどうかを判定する判定手段と、判定手段により距離が所定値未満であると判定された場合、支援手段を休止モードから支援可能モードに移行させ、距離が所定値以上であると判定された場合、支援手段を休止モードのまま維持するモード設定手段とを備える。
(もっと読む)
ビデオ画像に基づく後方走行車に対する警告方法
【課題】 ビデオ画像に基づいて、高速道路における渋滞時に、後方走行車が前方走行車に衝突又は接触することを回避する方法を提供する。
【解決手段】 高速道路における渋滞(S1)の最後尾の車両(前方走行車)に設置したビデオカメラから、後方の道路の画像を受け取るステップ(S2)と、当該画像から、前方走行車と後方走行車の衝突の危険を判断するステップ(S3)と、前記危険が存在すると判断された際にハザードランプを点滅させて、前記後方走行車の運転者に警告するステップ(S4)と、前記危険が解消された際(S5)に、前記ハザードランプを消灯させるステップ(S6)を備える。
(もっと読む)
車両操縦の際道路通行車両の運転者を支援する方法
本発明は、車両操縦の際道路通行車両の運転者を支援する方法であって、車両周辺特に道路の車線を区画する標識及び交通標識が、周辺センサ装置(1)により検出され、画像評価システムにより評価されるものに関する。本発明によれば、周辺センサ装置(1)の画像データが、車線に関連する情報について評価され、識別された車線に関連する情報が、記憶装置(2a)に記憶されている国特有の車線標識を示すデータにより評価され、車両の現在の場所に相当する第1の国評価信号(S1)が発生され、かつ/又は交通標識に関連する情報について評価され、識別された交通標識に関連する情報が、記憶装置(3a)に記憶されている国特有の交通標識を示すデータにより評価され、車両の現在の場所に相当する国評価信号(S2)が発生され、かつ/又は自動車登録標識(4)の識別について評価され、頻度分析により国評価信号(S3)が発生される。1つ又は複数の国評価信号(S1,S2,S3)からマイクロプロセッサ(5)により、車両の現在の場所を示す国信号(L)が発生され、国信号(L)により、車両の縦方向操縦及び横方向操縦に関する国特有の情報を出力する運転者通報装置(6)が駆動され、かつ/又は国信号(L)が車両の縦方向操縦及び/又は横方向操縦を支援する少なくとも1つの運転者支援システム(7)へ供給される。更に本発明は、本発明による方法を実施する装置に関する。 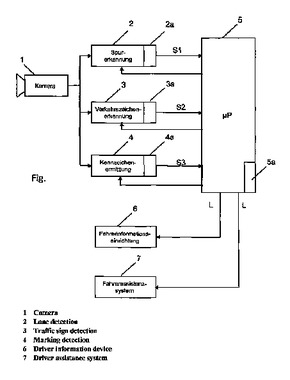 (もっと読む)
(もっと読む)
車両の衝突を回避するための装置
【課題】運転者の急ぎ度合いを考慮して衝突可能性を判定し、より的確なタイミングで衝突回避動作を発動できるようにする。
【解決手段】車両が一時停止したときの該車両の走行状態に基づいて、該車両の運転についての急ぎ度合いを判定し、該判定された急ぎ度合いに応じて、該一時停止した後に車両が発進するときの加速度(Ga)を推定する。車両が発進してから、該推定された加速度に基づいて、接近してくる移動物体との衝突の可能性を判定し、該衝突の可能性の判定結果に基づいて、衝突回避のための動作を発動する。
(もっと読む)
操縦支援装置
【構成】カメラC_3は、車両に設けられて斜め上方向から地面を捉える。CPU16は、カメラC_3から出力された被写界像P_3を地面に対する鳥瞰画像に変換し、車両の前後方向の姿勢を定義するべく地面に描かれた複数の直線を表す線画像を鳥瞰画像から探索する。発見された線画像に現われた複数の線の平行性がエラー条件に合致する場合、CPU16は、バックギアの選択に応答して表示装置22に表示されるキャラクタ画像を点滅させる。
【効果】鳥瞰変換特性の異常に起因する事故を抑制することできる。
(もっと読む)
1,001 - 1,010 / 6,854
[ Back to top ]