
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
1,021 - 1,030 / 6,854
運転支援装置
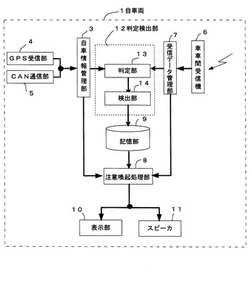
【課題】衝突可能性がある他車両の接近に対して注意喚起を行なう運転支援装置において、ドライバに最適なタイミングで注意喚起が行なえるようにする。
【解決手段】検出部14により、衝突可能性があって自車両1に接近する他車両21、23のヒヤリハットの発生を検出し、この検出に基づき、衝突可能性があって自車両1に接近する他車両21、23のヒヤリハットの発生状況から学習し、実際に注意喚起のタイミングの補正が必要なときにのみ、注意喚起処理部8により、記憶部9の注意喚起のタイミングを自動的に的確に自車両1のドライバの運転行動の特性に応じた最適なタイミング補正し、次回の注意喚起のタイミングに、記憶部9の補正されたタイミングで表示部10、スピーカ11によって注意喚起を行なう。
(もっと読む)
車両の衝突を回避するための装置

【課題】自車両の移動物体の進行経路までの距離をより良好な精度で推定して衝突可能性の判定精度を向上させる。
【解決手段】車両の周辺の物体を検出し、検出された物体のうち、該車両の進行経路に向けて接近してくる移動物体を判定する。移動物体の進行経路に沿って存在する白線および縁石の少なくとも一方を検出する。車両から、該検出された白線および縁石の少なくとも一方までの第1の距離dlに基づいて、該車両から該移動物体の進行経路までの距離dtを推定する。推定した距離dtに基づいて、車両が移動物体と衝突する可能性を判定し、該衝突の可能性の判定結果に基づいて、衝突回避のための動作を発動する。
(もっと読む)
車道のカーブ区間のカット軌跡を求める方法および制御装置
ここで提案されているのは、車両(326)による車道のカーブ区間(320)のカットを可能にするカーブ軌跡を求める方法である。ここではカーブ区間(320)についての情報を受信し、セグメント長および開始点曲率を有する少なくとも1つの曲線セグメントにこのカーブ区間を分割(320)する。ただしこの曲線セグメントは、直線セグメントであるか、円弧セグメントであるか、または曲率が曲線セグメントの弧長の関数である曲線セグメントである。ここでは上記の少なくとも1つの曲線セグメントからカット軌跡(330)を求めて、このカット軌跡が、上記カーブ区間(320)の所定の点において、前記レーンの中央(328)を基準にしてあらかじめ設定した偏差量(332)を有するようにする。 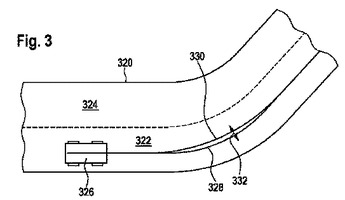 (もっと読む)
(もっと読む)
衝突回避支援装置、および衝突回避支援プログラム
【課題】自車両が車線変更する際に他車両と衝突しないように支援を行う衝突回避支援装置において、車線変更時の運転者の負担をより軽減できるようにする。
【解決手段】衝突回避支援システムにおいては、自車両が現在の速度のまま車線変更する際に必要となる等速変更領域として設定するとともに、自車両が加速してから車線変更する際に必要となる加速変更領域、および自車両が減速してから車線変更する際に必要となる減速変更領域を設定する(S210)。そして、各変更領域設定手段が設定した各領域のうち、他車両が存在しない領域を抽出する(S230)。さらに、他車両が存在しない領域が存在しない場合、車線変更すると危険であると判断し、等速変更領域に他車両が存在しない場合、現在の速度のまま車線変更可能と判断し、加速変更領域または減速変更領域に他車両が存在しない場合、加速または減速すれば車線変更可能と判断する(S150)。
(もっと読む)
接近物検知装置、接近物検知システム、および、接近物検知方法
【課題】車両から降車する際にドアノブを動かすようなドア開閉操作を行わなくとも、車両の乗員に対して、車両のドア開放時に接触や衝突を引き起こす可能性のある接近物を確実に検知できる技術を提供することを目的とする。
【解決手段】車両が停止した状態で、車両に搭載されたカメラで得られた撮影画像に基づいて、車両に接近する接近物を検知する。そして、車両の複数のドアのうち接近物が接近している車両のドアを特定し、接近物を検知したことに応答して、ドアに対応する前記警報装置を作動させる。これにより、車両から降車する際にドアを開放して接近物に接触したり衝突する危険を回避できる。
(もっと読む)
接近物検知装置、接近物検知システム、および、接近物検知方法
【課題】車両がイグニッションOFFの状態であっても、車両に乗車している乗員の全員が降車を完了するまで車両への接近物検知を行うことを可能とする技術を提供する。
【解決手段】車両が停止した状態で、車両に搭載されたカメラで得られた撮影画像に基づいて、車両に接近する接近物を検知する。そして車両をイグニッションOFF状態とした場合でも乗員検知手段により車両内に乗員が検知される場合は前記接近物の検知を継続して行い、乗員検知手段により車両内に乗員が検知されない場合は接近物の検知を終了する。これにより、車両をイグニッションOFF状態とした場合でも、乗員検知手段により車両内に乗員が検知される場合は前記接近物の検知を継続して行うことで、車両から乗員が全員降車するまで接近物の検知を行える。
(もっと読む)
車両用制御装置
【課題】本発明は、衝突発生を検出した後に、衝突した車両を衝突発生現場から移動できないようにすることを目的としている。
【解決手段】このため、車両の衝突を検出する衝突検出手段を備え、衝突検出手段により衝突が検出された時には、予め設定された上限速度を超えないように車両の走行速度を制限する車速制限手段を備える。また、車両の衝突を検出する衝突検出手段を備え、変速機の変速段を切り換える変速レンジ切換手段を備え、衝突検出手段により衝突が検出された時には、変速レンジ切換手段は、変速レンジを中立レンジに強制的に切り換え、予め設定された条件の成立後に停車レンジに強制的に切り換える。
(もっと読む)
衝突予測装置
【課題】従来に比して衝突の誤判定を低減した衝突予測装置を提供する。
【解決手段】自車両に搭載され、当該自車両と他車両との衝突を予測する衝突予測装置であって、自車両の周囲に電磁波を送信し、他車両から反射された当該電磁波の反射波を受信することによって当該他車両の走行情報を検出する他車両情報検出手段と、他車両の走行情報が検出された場合、自車両と他車両との衝突の危険性が高いか否かを当該走行情報に応じて判定する衝突判定手段と、自車両周辺が渋滞しているか否かを判定する渋滞状況判別手段と、渋滞状況判別手段の判定結果に応じて衝突判定手段の判定感度を低減する感度変更手段とを備える、衝突予測装置である。
(もっと読む)
衝突被害軽減装置
【課題】衝突被害軽減装置のブレーキ作動後、所定条件下でブレーキ作動状態を解除する。
【解決手段】ブレーキ作動後、障害物がレーダの死角に入ったか否かを判定する(S6、S7)。障害物が死角に入れば、少なくとも、死角に入ってから測定される車速Vm、並びに、死角に入ってからの経過時間tcに基づいて、障害物までの推定距離Xを演算する(S14、S15)。そして、衝突が検出されず、且つ、推定距離Xが0以下であるときに、死角に入った障害物との衝突を回避できたと判定して、ブレーキ作動状態を解除する(S16、S17、S11)。このため、車両を迅速に通常走行へと復帰させることができる。
(もっと読む)
運転支援装置
【課題】運転支援装置において、自車両と衝突する可能性があるものがあるか否かを正確に把握し、運転者が不要な警報を受けることがないようにすることにある。
【解決手段】制御手段(3)は、衝突可能性判定手段(3C)により衝突する可能性があると判定された対象物を運転者(P)が認識したか否かを判定する認識判定手段(3D)を備え、この認識判定手段(3D)により対象物を運転者(P)が認識したと判定された場合に警報手段(9)から警報を出力しないように制御する。
(もっと読む)
1,021 - 1,030 / 6,854
[ Back to top ]