
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
1,061 - 1,070 / 6,854
運転支援装置
【課題】自車周辺の障害物と自車との接触のリスクを考慮に入れ、自車が現実的な運転行動を行うことができる支援を行う運転支援装置を提供する。
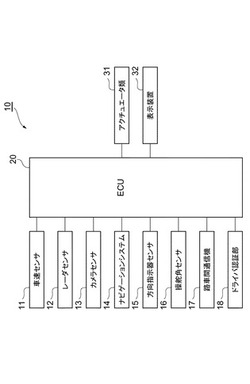
【解決手段】運転支援装置10のECU20は、自車周辺の状況に対する自車100の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、規範行動候補に係る運転行動により自車100が走行した場合における自車100周辺の障害物と自車100との接触のリスクを予測する。このため、自車100周辺の障害物と自車100との接触のリスクを考慮に入れた規範行動候補を提供することが可能となる。
(もっと読む)
車両用制御装置

【課題】ミリ波レーダが開閉バーを物体として検出し、PCSが作動することによって運転者に違和感を与えてしまうこと等を抑制できる車両用制御装置を得る。
【解決手段】ETC車載器10と路側アンテナの通信が完了したときから、車速センサ50によって検出された自車両の速度が所定速度以上になったときまで、物体判定閾値を、開閉バーを無視するように、基準値から開閉バー判定値に変更し、自車両の前方物体からの反射波のピークレベルが物体判定閾値未満の場合、前方物体をノイズと見なし、一方、ピークレベルが物体判定閾値以上である場合、前方物体を目標物体として検出し、前方物体の距離及び相対速度を算出するミリ波レーダ20と、算出された前方物体の距離及び相対速度に基づき、衝突予想時間及び衝突軽減処理閾値を算出し、衝突予想時間が衝突軽減処理閾値未満である場合、衝突軽減処理を行う衝突軽減制御部30とを設けた。
(もっと読む)
車両位置検出装置、車両位置検出方法、及び車両位置検出プログラム
【課題】広角画像を用いて行う、車線に対する車両の位置関係の検出の精度を良くする。
【解決手段】白線部分画像領域抽出処理S110は、道路を走行中の車両の走行方向に対する側方の方向を撮像した側方画像から、第一部分画像領域及び第二部分画像領域を抽出する。この2つの部分画像領域は、道路の路面上に描かれており当該車両が走行している車線の境界を表している白線の破線において当該破線の空線部分を挟み込んでいる白線部分が各々に映っている領域である。推定処理S112は、第一部分画像領域に映っている第一白線と第二部分画像領域に映っている第二白線とを滑らかに結ぶ推定線を側方画像上に推定する。この推定は、側方画像上での第一白線及び第二白線の各々についての線端の位置及び当該線端での向きに基づいて行われる。位置関係検出処理S113は、この推定線の側方画像上での位置に基づき、車線に対する車両の位置関係を検出する。
(もっと読む)
車両用経路案内装置
【課題】充放電を希望する車両のニーズに応えることができ、加えて、渋滞時にあっては、交通量の分散を図ることができる車両用経路案内装置を提供する。
【解決手段】車両用経路案内装置によって、EV、HV、PHVを含む電力の授受が可能な車両であって電力の授受を希望する車両を、車車間充電が可能な電力授受経路Eへ誘導することで、当該電力の授受が可能な車両の特性を考慮した経路案内を行い得るようにし、加えて、渋滞時にあっては、交通量を平準化するための案内経路である交通量平準化経路A1,A2とは別の案内経路として電力授受経路Eを設定することで、案内経路のバリエーションを増やす。
(もっと読む)
車両周辺表示制御装置および車両周辺表示制御装置用のプログラム
【課題】車両の前進駐車を支援する車両周辺表示制御装置を提供する。
【解決手段】車両の周囲を撮影するカメラによって撮影された撮影画像を用いて作成された表示画像を車両内のディスプレイに表示させる車両周辺表示制御装置において、車両の前進駐車を支援するためのガイド線21、23〜25を表示画像に重畳させる。その際、ガイド線21、23〜25には、前端ガイド線21が含まれ、前端ガイド線21は、車両の旋回外側前端17の位置を車両の旋回中心15を中心に90°回転移動させた位置19を第1の位置とし、第1の位置19から車両の前後方向後ろ向きに真っ直ぐ、車両の車幅Wだけ離れた位置20を第2の位置としたとき、第1の位置19および第2の位置20を両端とする直線21とする。
(もっと読む)
交差点運転支援装置
【課題】非優先道を走行する車両が優先道に進入するに際し、見通しの良い交差点では交差点支援情報を報知しないことで、運転者に与える煩雑感を軽減させるようにする。
【解決手段】非優先道102から優先道101に進入するに際し、見通し判定処理部14は一時停止位置104付近に設置されている第1インフラ設備103aから得られた優先道101側の移動体情報と、車両に搭載されている自律センサで検出した優先道101側の移動体情報とを比較し、不一致の場合は見通しが悪いと判定し、一致した場合は見通しが良いと判定する。そして不一致の場合は運転者に交差点支援情報を運転者に報知し、一致した場合は、運転者が目視により確認済みであると判定し報知しない。
(もっと読む)
障害物認識装置
【課題】車載カメラの撮影画像の障害物候補が、自車両周辺の障害物であるのか影であるのかを、安価な構成で撮影画像を処理するだけで正確に認識できる技術を提供する。
【解決手段】単眼カメラ3の撮影画像から障害物候補が検出手段6aにより検出される。そして、走行路に投影された影の内部は平坦でべた状であることから、障害物候補の画像の特徴の内部が平坦になるか否かから、障害物候補が影であるのか障害物(他車両)であるのかが認識手段6bにより認識されるため、単眼カメラ3の撮影画像の障害物候補が、自車両1周辺の障害物(他車両)であるのか影であるのかを、撮影画像を処理するだけで正確に認識できる。しかも、車載レーダなどの高価な測定機器を自車両1に搭載する必要がないため、安価な構成とすることができ、コストダウンを図ることができる。
(もっと読む)
非常脱出用ガラス窓破壊装置
本発明は、非常脱出用ガラス窓破壊装置に関するものであり、その目的は、弱い力で打撃することによって、車両のガラス窓を破壊可能であるようにさせることで、非常脱出用ガラス窓破壊装置の安全性を向上させることができるし、また、か弱い子供または女性及老弱者が使用しても確かで速かにガラス窓を破壊可能にさせるものにあり、このような目的は、ガラス窓に固定用部材を媒介で一端が固定可能になるように形成されるが、中心軸方向に貫通ホールが形成されて具備される固定部材と、該固定部材の上部を一端の内側に収容して、使用者が打撃時に下向き移動可能になるように具備される覆い部材と、前記固定部材の貫通ホール内側に一端が挿入されて係止されて、他端は前記覆い部材に固定されて、前記覆い部材を弱い力で打撃することに対応されるように係止解除されることによって、硝子窓側に移動して、ガラス窓を破壊可能になるように具備される破壊手段を含んでなされたものによって達成される。 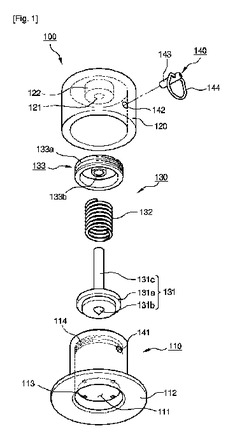 (もっと読む)
(もっと読む)
路外逸脱防止装置
【課題】 路外逸脱防止のための制御に対する効果を十分に得ると共に、路外逸脱防止のための制御の中止に対して運転者に違和感を与えることがない。
【解決手段】 コントローラ1が、走行状態から自車両が走行車線から逸脱するか否かを判断すると共に、自車両が走行する道路上の車線端又は道路境界に設けられ車両に振動を付与するランブルストリップが検出された場合に、車線外への逸脱を回避するように車両システム6により制駆動力を発生させる路外逸脱防止動作を制御する。コントローラ1は、運転者の操作に基づいてベース閾値を路外逸脱防止動作が中止されやすくする低方向に補正し、操作量が閾値を超えた場合に、車両システム6による路外逸脱防止動作を終了させる。
(もっと読む)
走行支援装置
【課題】追従走行制御を行う際、自車両の無駄な加減速を低減し、燃費を向上させる。
【解決手段】走行支援装置は、先行車両の走行状態と先先行車両の走行状態とに基づいて、先行車両と先先行車両との間の車間距離が拡大傾向である否かを判定し、車間距離が拡大傾向であると判定した場合には、自車両の車両速度が先行車両の車両速度よりも高くなるように、自車両の加減速度を制御する制御手段(10)を備える。
(もっと読む)
1,061 - 1,070 / 6,854
[ Back to top ]