
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
101 - 110 / 6,854
駐車領域自動可変型駐車補助システム及びその方法
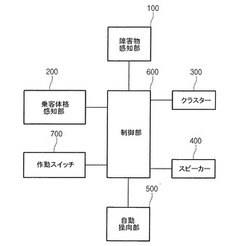
【課題】駐車時の乗客の体格を把握し、駐車壁面と車両との距離を可変にできる駐車領域自動可変型駐車補助システム及びその方法を提供する。
【解決手段】本発明に係る駐車領域自動可変型駐車補助システムは、駐車時の車両の乗客の体格を感知する乗客体格感知部200と、前記乗客の体格に応じて駐車場の壁面と車両との駐車後の距離を設定したあと駐車軌跡を算出する制御部600と、前記制御部により制御され、前記算出された駐車軌跡に沿って車両の操向を自動制御する自動操向部500とを含むことを特徴とする。
(もっと読む)
表示装置及び表示方法

【課題】照射領域のサイズが限られている場合であっても、指示地点までの進行方向を運
転者に示すことができる表示装置及び表示方法を提供する。
【解決手段】設定部は、運転者に指示すべき指示地点を設定する。判定部は、乗り物が指
示地点に接近した場合、指示地点を示すべき指標画像を表示領域内に表示することが可能
であるか否かを判定する。生成部は、表示することが可能である場合は、指示地点まで向
かって移動する指標画像を生成し、表示することが可能でない場合は、指標画像に付帯す
る付帯画像であって、表示領域外で指標画像が示しているであろう位置を、運転者に認識
させるための付帯画像を生成する。
(もっと読む)
車両の運転支援装置
【課題】運転者が車両の前方の状況を確認し易いようにカメラの撮像画像を運転者に対して表示することができる車両の運転支援装置を提供する。
【解決手段】運転支援装置1は、カメラ3aの撮像画像を表示する表示手段4,7と、所定の条件が成立する場合にカメラ3aの撮像画像から運転者の注意を喚起すべき対象物を検出し、対象物を検出した場合に運転者の注意を喚起するための処理を実行する注意喚起処理手段8とを備える。カメラ3aの撮像画像の表示モードは、撮像画像の一部の領域(小画角領域)を拡大して表示する小画角領域表示モードと、小画角領域を含む広角領域を表示する広角領域表示モードとがある。表示手段4,7は、前記所定の条件が成立する場合には、小画角領域表示モードにて撮像画像を表示し、前記所定の条件が成立しない場合には、広角領域表示モードにて撮像画像を表示する。
(もっと読む)
車両用表示装置
【課題】自車両の近くに存在する他車両のみならず自車両の遠くに存在する他車両を認識するための情報をより把握し易い態様で表示する。
【解決手段】車両用表示装置10は、他車両の存在を提示する環状の発光表示領域を有する表示出力部15を備えており、方角特定処理部23によって、自車両の位置情報および他車両の位置情報に基づいて、自車両に対して他車両が存在する方角を特定し、距離特定処理部24によって、自車両の位置情報および他車両の位置情報に基づいて、自車両と他車両との間の距離を特定し、表示制御処理部25によって、発光表示領域のうち方角特定処理部23によって特定される方角に対応する部分を距離特定処理部24によって特定される距離に応じた長さで表示させる。
(もっと読む)
操舵支援装置
【課題】車両がカントのある路面を走行している場合に、路面の低い側に車両を換向させるガイダンストルクが与えられたときに、操舵角速度および操舵角変化量が過度に大きくなるのを抑制することができる操舵支援装置を提供する。
【解決手段】操舵角速度閾値設定部52は、ガイダンストルク指令値TG*と車速Vとに基づいて、操舵角速度閾値Vhthを設定する。速度偏差演算部52は、操舵角速度演算部51によって演算された操舵角速度の絶対値|Vh|と操舵角速度閾値Vhthとの偏差ΔVhを演算する。ゲイン設定部54は、速度偏差ΔVhhに基づいて、ゲインGを演算する。ゲイン乗算部55は、ゲインGをガイダンストルク指令値TG*に乗じることにより、最終的なガイダンストルク指令値TG*を求める。
(もっと読む)
車両の危険報知装置及び危険報知システム
【課題】車線をはみ出しての走行や横転のおそれのある他車両を検出し、早期に自車両及び他車両に危険報知を行なうことができるようにした、車両の危険報知装置及び危険報知システムを提供する。
【解決手段】
周辺道路情報検出手段17により自車両1の前方にカーブ路があることが検出され、且つ、情報通信手段14により取得された他車両2の位置情報に基づいて他車両2が該カーブ路に進入する位置にいることが検出された場合、少なくとも他車両2の車速Vが所定車速Vp以上であることを含む危険報知条件が成立したら、危険報知手段11により自車両1の運転者に対して危険報知させ、情報通信手段14により他車両2に危険報知信号を送信させる危険報知制御手段15を備える。
(もっと読む)
走行制御装置および車両
【課題】物体の衝突を回避しつつ、車両を物体に近づけることができる走行制御装置および車両を提供すること。
【解決手段】車両1の速度が大きいほど長い第1バンパー距離71を設定する。これにより、車両1が低速走行する場合には高速走行する場合に比較して、第1バンパーより71が短いので、物体80が近くまで迫った場合に第1反発力F1が仮想的に車両に加えられる。すなわち、車両1が低速走行する場合、車両1と物体とが遠い間は、第1反発力F1が車両1に加えられないか、若しくは、小さな第1反発力F1が車両1に加えられる。よって、車両1を物体80に近づけることができる。
(もっと読む)
車載型情報伝達装置
【課題】与えられた情報を車両の振動と区別して搭乗者が容易に判別可能な車載型情報伝達装置を提供する。
【解決手段】車両7の一部分に設置され、入力される動作指令信号に応じて加振力を発生するアクチュエータA1〜A5と、アクチュエータA1〜A5の設置場所と関連づけられる車両7の一部分における振動を検出する加速度センサS1〜S5と、アクチュエータA1〜A5に対して動作指令信号を出力することでアクチュエータA1〜A5により生じる振動を制御する制御部2とを備えており、制御部2が、加速度センサS1〜S5による振動の検出信号を基にしてアクチュエータA1〜A5の設置場所における振動を相殺する相殺信号を生成する相殺信号生成部21a〜21eと、搭乗者に伝達する情報に応じた情報信号を生成する情報信号生成部22a〜22eとを備えた。
(もっと読む)
駐車支援装置
【課題】簡単な構成で車止めのすり抜け防止を図ることができる駐車支援装置を提供する。
【解決手段】本発明は、車両の後退中に、車両後方の路面上の一対の車止めの車幅方向における中心位置を検出する車止め検出手段1と、一対の車止めの中心位置と、車両の車幅方向における中心位置とを一致させるように、ドライバへの報知及び車両制御の少なくとも一方による支援を行う支援手段と2を備える。
(もっと読む)
運転支援装置及び運転支援方法
【課題】通信状況に関係なく駐車車両の死角に存在している潜在リスクを正確に予測して潜在リスクとの衝突を回避するための運転支援を行うことのできる運転支援装置を提供する。
【解決手段】本発明の運転支援装置1は、駐車車両を検出する駐車車両検出部2と、自車両周囲の道路環境を検出する道路環境検出部3と、自車両の走行状態を検出する走行状態検出部4と、駐車車両の死角に存在している潜在リスクを予測して潜在リスクと自車両とが衝突すると想定される仮想衝突地点を予測する潜在リスク推定部5と、仮想衝突地点から自車両の運転支援を終了する地点までの距離を算出して運転支援終了地点を決定する運転支援終了地点決定部6と、仮想衝突地点における潜在リスクとの衝突を回避するための運転支援を行う運転支援部7とを備えたことを特徴とする。
(もっと読む)
101 - 110 / 6,854
[ Back to top ]