
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
1,101 - 1,110 / 6,854
クリアランスセンサ取付構造
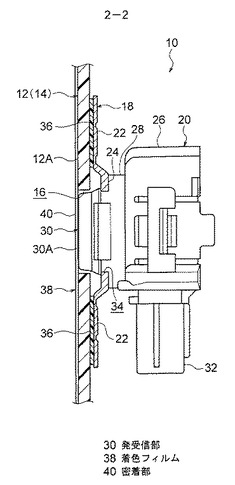
【課題】バンパカバーにクリアランスセンサが取り付けられた場合でも、バンパカバーの見栄えを確保する。
【解決手段】クリアランスセンサ取付構造10によれば、バンパカバー12に形成された貫通孔16の内側には、クリアランスセンサ20の発受信部30が配置されているが、このバンパカバー12の少なくとも貫通孔16を一部に含む領域の表面には、着色フィルム38が密着されている。そして、このバンパカバー12の少なくとも貫通孔16を一部に含む領域は、バンパカバー12の表側からこの着色フィルム38によって被覆されている。従って、クリアランスセンサ20の発受信部30を着色フィルム38によって覆い隠すことができるので、バンパカバー12の見栄えを確保することができる。
(もっと読む)
車両用障害物検出装置

【課題】カメラで撮影した複数の画像を用いて、障害物とそれ以外の領域を識別可能な俯瞰視点の状況図を自己生成する車両用障害物検出装置を提供する。
【解決手段】車両の周囲を撮影可能な撮像部と、撮像部で撮影した車両周辺の画像に含まれる障害物を検出する障害物検出部と、撮影部で撮影した車両周辺の画像を所定の仮想視点から見た俯瞰画像に変換して出力する俯瞰画像生成部と、俯瞰画像に含まれる障害物画像と障害物以外の画像とを識別可能な画像に変換し、車両の周辺の状況を表す俯瞰視点の状況図を作成する状況図生成部と、状況図を表示する表示部と、を具備する。
(もっと読む)
車両の路外逸脱防止制御装置
【課題】ブレーキに対して過度な負荷が加わることなく、ブレーキ装置により発生する振動や騒音も抑制し、ステアリング制御とブレーキ制御とによりドライバに対して現状の走行状態を的確に伝達しつつ、適切に車両の路外逸脱を防止する。
【解決手段】白線からの逸脱量に応じ白線からの逸脱を防止する第1のブレーキ制御量ABL0を、障害物に対する逸脱量に応じ障害物に対する逸脱を防止する第2のブレーキ制御量ABS0を設定し、白線からの逸脱を防止する第1のステアリング制御量ASL0を、第1のブレーキ制御量ABL0が設定される逸脱量の領域よりも小さな逸脱量の領域で設定し、障害物に対する逸脱を防止する第2のステアリング制御量ASS0を、第2のブレーキ制御量ABS0が設定される逸脱量の領域よりも小さな逸脱量の領域で設定する。そして、これらを基に、ブレーキ制御量AB、ステアリング制御量ASを算出する。
(もっと読む)
車両用注意喚起装置
【課題】通信により取得した移動物体に関する情報を利用して、より効果的にドライバーに移動物体に対する注意を喚起することが可能な車両用注意喚起装置を提供する。
【解決手段】HMI制御部25は、光ビーコン通信機11、路車間通信機12又は車車間通信機13により得られた情報が、移動物体と自車両100との接触の可能性を示すときは、注意喚起表示53をディスプレイ31に表示させる。HMI制御部25は、注意喚起表示53が表示されているときに、通信で得られた情報から移動物体との接触の可能性が無くなったことが判定されるときは、少なくとも所定時間は、注意喚起表示53より注意喚起の度合の低い注意喚起履歴表示54を表示させる。これにより通信で得られた情報から接触の可能性が無くなったことが判定されても、ドライバーの安全意識の低下を抑制でき、より効果的にドライバーに注意を喚起できる。
(もっと読む)
車両制御装置
【課題】接触回避支援制御機能と、車両姿勢安定化制御機能との的確な協調制御を行う。
【解決手段】接触回避支援制御部は、VSA制御部によるVSA制御がオフ状態になっている場合は、オン状態になっている場合のタイミングよりも早いタイミングで接触回避支援、例えば、警報を発生し、該警報により操向ハンドルの操作を促すことで、確実に接触回避支援を行うことができ、結果として、接触回避支援制御機能と、車両姿勢安定化制御機能との的確な協調制御を行うことができる。
(もっと読む)
視覚障害者用移動体接近報知方法および視覚障害者用移動体接近報知装置
【課題】視覚障害者がハイブリッド自動車、電気自動車等の走行音の小さな移動体の接近を、移動体の走行音が小さな利点を喪失させることなく、確認・判断出来る方法・装置を提供することにより、視覚障害者が移動体に対する身構えと危険回避行動を取れる様にして視覚障害者が被害者として人身事故等に遭遇する危険性を低減することにある。
【解決手段】自動車や電車等の移動体に指向性のある電波であるマイクロ波を走行方向の前方に発射出来るマイクロ波発射装置を装着させると共に、前記移動体が発射するマイクロ波を受信・検知出来る電波受信・検知手段と該電波受信・検知手段での電波受信・検知に連動して移動体の接近と接近方向を音声で知らせることの出来る音声伝達手段とを少なくとも具有した移動体接近報知装置を視覚障害者が上体部に着装することにより、視覚障害者が走行音が小さな移動体の接近を確認・判断出来る様にする方法・装置を提供する。
(もっと読む)
車両用接触回避支援装置
【課題】 自動ブレーキ制御と操舵アシスト制御の的確な協調制御を行う。
【解決手段】 自車(車両10)と自車前方の障害物(車両12)との相対位置を検出する相対位置検出手段により検出された障害物(車両12)との相対位置が、自車前方の第1領域Bca内にある場合には、自動ブレーキ制御を行い、検出された障害物(車両12)との前記相対位置が、第1領域Bca外の車幅方向に広い第2領域Sca内にある場合には、操舵アシスト制御を行うようにしたので、自動ブレーキ制御と操舵アシスト制御の的確な協調制御が実施される。
(もっと読む)
車両用白線認識装置
【課題】エッジ検出等の演算処理を複雑化させることなく、多重白線等に対しても安定した認識結果を得ることができる車両用白線認識装置を提供する。
【解決手段】ステレオ画像認識装置4は、画像上の左右の各白線検出領域内において、水平方向に設定した複数の検索ラインL上での輝度変化に基づいて検索ラインL毎に各1組の白線開始点Ps及び白線終了点Peを検出すると共に、これら各対をなす白線開始点Psと白線終了点Peとの中間点を算出し、白線開始点Psからなる点群と中間点Pmからなる点群とのうち、予め設定された条件に基づいて判定されるばらつきが最も小さい点群を白線演算対象の点群として選定して当該選定した点群に基づいて白線を演算する。
(もっと読む)
運転支援装置
【課題】 車両後退時に最終的に達成したい操作目標に対する進捗状況を暗示的に音を用いて運転者に簡単かつ効果的に報知する運転支援装置を提供することである。
【解決手段】車両後退時にリバース音を出力して運転を支援する運転支援装置50。車両状態及び車両周辺状態を含む運転支援情報を取得する情報取得部51と、リバース音を主音とみなした音階に属するリバース音を音階リバース音として管理するリバース音管理部52と、運転支援情報に適応する時系列的なリバース音の音階の流れを決定する出力リバース音決定部53と、リバース音管理部によって管理されているリバース音から出力リバース音決定部によって決定された音階の流れに適するリバース音を選択してスピーカに出力するリバース音出力制御部54とが備えられている。
(もっと読む)
走行支援装置および走行支援方法
【課題】検出対象を回避する必要があるかを適切に判断可能な走行支援装置を提供する。
【解決手段】車両前方を撮像する撮像手段20a,20bと、撮像手段20a,20bにより撮像された画像の情報に基づいて、画像内に存在する特徴点を抽出する特徴点抽出手段と、特徴点の移動方向および移動速度を含む移動情報を算出する移動情報算出手段と、移動情報に基づいて、検出対象を含む対象領域を抽出する対象領域抽出手段と、撮像手段20a,20bから見た検出対象の移動速度を、相対角速度として算出する相対角速度算出手段と、相対角速度に基づいて、検出対象を回避する必要があるかを判断する判断手段と、を有することを特徴とする走行支援装置。
(もっと読む)
1,101 - 1,110 / 6,854
[ Back to top ]