
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
161 - 170 / 6,854
車両接近通報装置
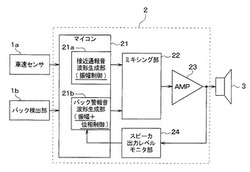
【課題】1つのスピーカにて接近通報音とバック警報音の発音を行いつつ、発音させる音の音圧が弱まることで歩行者に自動車の動き出しを認識させる効果が低下することを抑制できるようにする。
【解決手段】スピーカ出力レベルモニタ部24によってスピーカ3から発音される音の出力レベルをモニタし、そのモニタ結果に基づいて、接近通報音波形生成部21aで接近通報音波形を補正すると共に、接近通報音バック警報音波形生成部21bでバック警報音波形を補正している。具体的には、接近通報音波形やバック警報音の音圧やバック警報音の位相を変化させるように補正する。これにより、音圧レベルが車両の後ろ近傍にいる歩行者が確実に聞き取れると想定される所定のしきい値となるように、もしくはそれを超えるように接近通報音およびバック警報音を制御でき、車両の後ろ近傍にいる歩行者が確実に聞き取れる発音が行われるようにできる。
(もっと読む)
移動体通信装置及び走行支援方法

【課題】自車の現在位置に基づいて、自車が後続車両から追突される可能性がある場合に、後続車両との事故を未然に防ぐため及び/又は自車の運転者を保護するために所定の制御を行う移動体通信装置及び走行支援方法を提供すること。
【解決手段】移動体に備えられ、感知器が検出した感知エリアに関する情報を含む情報を受信する通信部と、前記移動体の現在位置及び移動速度を取得し、前記移動体の現在位置が前記感知エリアよりも前記移動体の進行方向手前側であって、前記移動体の移動速度が所定速度以下のときに、所定の制御を行う制御部と、を備えることとする。
(もっと読む)
運転支援システム
【課題】交通に関する情報を運転者または車両に適切に提供することが可能な技術を提供すること目的とする。
【解決手段】運転支援システムは、カメラ11と、無線基地局21と、無線移動局51と、表示部52とを備える。カメラ11は、車両91が通行する車両通行帯の画像を撮像し、当該画像を送信する。無線基地局21は、カメラ11により撮像される車両通行帯を含む通信エリアを有し、カメラ11からの画像を無線回線により同報通信する。無線移動局51は、各車両91に搭載され、自身が属する通信エリアを有する無線基地局21から同報通信された画像を受信する。表示部52は、各車両91に搭載され、無線移動局51で受信された画像を表示する。
(もっと読む)
車両用無線通信装置及び通信システム
【課題】車車間通信で送受信する情報通信量を抑えながらも、情報の受信側において、複数の位置情報からなる走行軌跡情報を受信した場合と同様に自他車両の相対位置関係を把握することを可能にする。
【解決手段】自車両の走行軌跡と先行車両の走行軌跡とが近似していると制御部12で判定した場合に、自車両の走行軌跡情報の代わりに、当該先行車両を特定可能な機器IDと最新の位置情報とからなる省略情報を、無線通信装置1から一定の送信周期で送信するように変更する。
(もっと読む)
運転支援装置
【課題】車両の所定位置に固定された撮像手段により車両周囲を撮像した画像を使用して、運転者にとってより使用感の良い運転支援画像を表示する運転支援装置を提供する。
【解決手段】画像処理手段は、車両40の後部に設置された撮像手段1で撮像した車両後方周囲画像から車両40後方に対応する領域を切り出しこれから後方画像を生成するとともに、車両40後方の左右範囲に対応する領域とを各々切り出しこれらから右後方周囲画像と左後方周囲画像とを生成する。そして、後方画像を表示手段の下部に表示するとともに、右後方周囲画像と左後方周囲画像とを表示手段の上部に並べて表示する。その際、右後方周囲画像は表示手段の中央部から右側部へ向かうに従って表示領域が上下に広く表示されるよう生成されるとともに、左後方周囲画像は表示手段の中央部から左側部へ向かうに従って表示領域が上下に広く表示されるよう生成される。
(もっと読む)
駐車支援装置
【課題】タッチパネル・ディスプレイが装備されていない車両であっても、複数の駐車パターンの中から状況に応じた駐車パターンを選択できる駐車支援装置100を提供する。
【解決手段】
所定の駐車モードに応じて車両の駐車を支援する第1モードと、駐車支援以外の車両の機能を実行する第2モードとを切替えるモード切替スイッチ21,22と、左と右にそれぞれ配置された対をなす左右方向スイッチ11,12と、前後にそれぞれ配置された対をなす前後方向スイッチ13,14とを含む方向スイッチ11〜14を備え、第1モードに切り替えられた場合において、左右方向スイッチ11,12が操作されると、左右方向スイッチ11,12の左又は右の配置に対応づけられた左又は右の駐車パターンを選択し、前後方向スイッチ13,14が操作されると、前後方向スイッチ13,14の前又は後の配置に対応づけられた並列又は縦列の駐車パターンを選択する。
(もっと読む)
交差点無停止走行制御方法
【課題】交差点無停止走行制御システムにおける車両の走行速度制御の簡易化、特に車両および車両運転者の走行条件維持に関する負荷の低減。
【解決手段】交差点の上流道路距離にある特定地点を目標交差点の信号1周期の間に通過して交差点に向けて走行中の車両において、特定地点通過以降一定時間毎に現時点の走行速度で交差点まで走行した場合の交差点到達予定時刻taを算出し、算出した交差点到達予測時刻taが、交差点の青信号期間内にある場合は継続しての現走行速度vでの走行を、青信号内にない場合は現走行速度vからの最小限の加減速によって交差点の青信号期間内に到達する走行条件を算出してその走行条件での走行を、現走行速度vからの最小限の加減速の結果走行速度が許容範囲外となると予想されるときは車両運転者に対して車両の交差点到達予定時刻taが赤信号時間帯になることを指示しつつ現走行速度vでの走行を行う。
(もっと読む)
移動体通信装置及び走行支援方法
【課題】複数の報知モードから1の報知モードを選択可能とすることによって、ユーザが報知を望む状況で報知が行われないことや、ユーザが報知を望まない状況で報知が行われることを防いで、ユーザの好みに配慮しつつ、信号機への注意を促すことができる移動体通信装置及び走行支援方法を提供すること。
【解決手段】移動体に備えられ、報知する条件を規定する複数の報知モードから1の報知モードを選択可能な移動体通信装置であって、前記移動体通信装置は、少なくとも信号機の現在の信号表示を特定可能な情報を含む情報を受信する通信部と、少なくとも、前記信号機の現在の信号表示と、選択されている報知モードとに基づいて信号機への注意を促す報知態様を決定する制御部と、を備えることとする。
(もっと読む)
自動運転装置
【課題】車両の周囲の物体の衝突を回避することが可能な自動運転装置を提供する。
【解決手段】自動運転装置100は、運転開始位置から目標位置へ車両を自動運転する自動運転制御部10と、自動運転中に車両に接近する物体を検知する検知部11と、自車位置から目標位置まで移動するのに要する第1完了時間と、自車位置から運転開始位置まで戻るのに要する第2完了時間と、を演算する完了時間演算部31と、自車位置から目標位置まで移動した場合に物体が車両に衝突するまでの第1衝突予測時間と、自車位置から運転開始位置まで戻った場合に物体が車両に衝突するまでの第2衝突予測時間と、を演算する衝突予測時間演算部32と、第1完了時間と第1衝突予測時間と第2完了時間と第2衝突予測時間とに基づいて駐車位置を設定する駐車位置設定部41と、を備える。
(もっと読む)
走行制御装置
【課題】 ドライバに与える違和感を軽減できる走行制御装置を提供する。
【解決手段】 自車走行路前方の車幅方向と高さ方向による走行路および障害物を検出し、走行路前方の立体空間を検出する立体空間検出部11と、検出された立体空間に対し、自車の障害物に対する衝突リスクの高さを推定する衝突リスク推定部12と、推定された衝突リスクの高さに応じて、衝突リスクが高い部分から距離を取るように自車の目標経路を演算する目標経路演算部13と、演算された推奨経路に基づいて運転支援を行う運転支援部14と、を備えた。
(もっと読む)
161 - 170 / 6,854
[ Back to top ]